Je partage une idée d'amélioration des chiens de mer existant.
 |
| Cerf-plongeant de Rousson/Truong 2009 |
Le problème :
En partant de cette version (assez proche du simple kitefoil, avec juste deux dérives en plus)
- elle a besoin de faire demi-tour
- avec un bridage simple, il n'y a pas non plus de garantie que le fuselage restera sous l'eau
C'est deux problèmes peuvent-être réglés juste avec une patte d'oie fixée aux extrémités des ailes (comme sur mes derniers essais) et un contrôle du différentiel de longueur depuis le pilote (ce qui me manquait sur mes derniers essais).
Le contrôle du différentiel permet à la fois de régler la hauteur de vol et de faire tourner le foil en le faisant plonger lors d'un changement d'amure (pour cela il faut suffisamment d'autorité de contrôle pour vaincre la stabilité naturelle).
La subtilité va résider dans le fait que la patte d'oie ne peut pas être ramenée au niveau de pilote (en théorie il faut que le point du bridage soit à l'intérieur du cercle défini par la courbure du foil). Il faut donc prévoir par exemple un anneau accroché à une des lignes et dans lequel passera l'autre ligne.
La dérive sur le foil principal ne semble pas non plus indispensable (la raideur verticale est assurée par le foil courbe) et risque même de dégrader la stabilité à mon avis (peut-être qu'elle amortit dans les vagues ?). La dérive au niveau du stabilisateur me parait par contre indispensable.
J'ai également réfléchi à d'autres moyens de retournement du foil (avec un stabilisateur mobile sur un rail d'avant en arrière et des palpeurs plus en avant pour améliorer le couplage tangage/pilonnement), mais c'est très complexe.
J'ai également réfléchi à un retournement autour de l'axe longi, mais c'est aussi trop complexe.
D'autant plus, que l'idée actuelle peut-être couplée avec celle d'un palpeur à l'avant :
- au lieu d'avoir un seul fuselage, on place un fuselage à chaque extrémité, cela va permettre au foil de voler plus haut et d'avoir la surface de l'eau au niveau du milieu du foil sans perdre la stabilité apportée par le stab.
- un autre foil courbe est mis plus en avant du foil principal entre les deux fuselages, avec une section réduite avec un arc de cercle prononcé afin de servir de palpeur
- Un arc de cercle moins prononcé est utilisé pour le foil principal.
 |
| Ma tante prof de dessin doit avoir honte de moi, mais l'idée est là. |
Cette solution a l'avantage de ne pas avoir de pièce mobile par rapport à une autre solution proposée
Edit 2024/12/11 : cette solution a par contre peut-être l'avantage de ne pas marcher... En effet la stabilité sur le foil principal grâce à la courbe est possible car le foil va prendre du roulis lorsqu'il sort de l'eau ce qui va augmenter la force faire et assurer la stabilité. Ici mon palpeur ne sera pas forcément suffisant pour faire tourner le foil, et surtout, il ne crééra peut-être pas le couplage tangage-pilonnement qui le justifie... Je pense que j'arrive à un moment où un outil de simulation prenant en compte les différents degrés de liberté serait intéressant !
Les essais du jour ont été décevants et les photos/vidéos effacées pour une raison inconnue. Pas trop le courage de détailler






Un petit bonus :
un vrai bateau tiré par hélicoptère
 |
| Source |
Et plus classique, un drone tirant un surfeur.
Un retour également sur les difficultés du drone a volé en rase-motte.
J'ai incriminé la mesure de la pression statique, mais cela peut-également être lié à l'inclinaison du drone qui diminue sa portance, ce qui n'est peut-être pas bien compensé.
Cela peut-aussi être lié à la mesure du capteur ultrason qui se retrouve en diagonale à cause de l'inclinaison du drone. La mesure augmente ce qui peut faire descendre le drone. Il est cependant probable que le capteur ultrason décroche dans ces conditions.
Date : 2 Novembre 2024
Localisation : Marseille Prado
Tracteur : Drone Parrot Bebop 2
Engin tracté : bouteille sèche flottante/étanche (Le Mousse) avec 2 mètres de laisse.
La caméra filmant vers l'arrière pour voir le comportement de l'engin tracté, je pilote en vue directe. En pratique, je ne vois pas assez bien le drone lorsqu'il est à la surface de l'eau, mais je peux vérifier qu'il n'y a pas de bateaux autour (il suffit de remonter le drone au-dessus de l'horizon pour le voir. Peut-être qu'avoir les yeux plus proches du niveau de l'eau pourrait aider).
Le drone est équipé d'un capteur ultrasonique de hauteur de vol et régulé grâce à ce capteur lorsqu'il est proche du sol. Le vol en rase-motte au-dessus de l'eau semble fonctionner. Avec 2m de ligne, je dois me mettre à environ 1m de hauteur. Ca fait un peu peur au début. La mer était calme heureusement (mais à l'échelle de mon engin, ça fait déjà une grosse mer).
L'engin tracté est attaché avant le décollage. Il se retrouve à pendouiller au décollage. Cela ne semble heureusement pas trop perturber le capteur ultrason (couplé à GPS et baromètre je pense).
Le drone a une petite tendance à perdre en altitude lorsqu'il accélère (voir vers la fin de la vidéo avant que je le remonte, c'est peut-être lié à une augmentation de la pression sur le capteur à cause d'un couplage avec la pression dynamique. Edit: ça peut aussi être lié à à l'inclinaison qui réduit la portance, ou augmente la distance mesurée par le capteur, voir à une désactivation du capteur dans certaines conditions).
Il peut être tentant de réduire la longueur de la laisse afin d'avoir un meilleur zoom, mais peut-être faut-il mieux prendre un peu de marge...
D'autant que si on essaie de descendre le drone trop bas, il déclenche la procédure d'atterrissage et plus moyen de remonter à ce moment... Je pense qu'il y a une sorte de sécurité (il faut rester 1 seconde le joystick vers le bas pour atterrir). Je vais vérifier la prochaine fois en mettant juste des petits coups vers le bas.

Lorsque le drone va vite, le vent apparent créé fait décaler le pendule par rapport à la verticale. C'est assez pratique pour mieux voir dans quel sens vol le drone. D'habitude, j'ai un mal fou en pilotage en vue directe, mais là je vois plus facilement dans quelle direction le drone va (avec une incertitude lorsqu'il est de face, on ne peut dire s'il se rapproche ou s'éloigne).
Dans un futur pas trop lointain, on peut envisager d'avoir une petit IMU et une balance fixées sur la ligne de traction afin de mesurer la performance.
Et en bonus, voici un petit spoiler des prochains essais :

Le sujet revient régulièrement, mais peu d'avancées visibles depuis 3ans...
J'avais partagé il y a quelques années 2 petits simulateurs de kites maisons :


J'avais également étudié il y a longtemps différents simulateurs, mais toujours en me limitant à un seul corps (et éventuellement un câble) :
- Simulateur naif en python
- Gazebo : simulateur d'UAV
- Morse : simulateur de robot
- Visualisation avec pandas 3D
- Simple animation avec openscad
- FreeKiteSim en python ou KiteSimulators.jl en julia
- essais d'intégration d'un kite dans FlightGear/JSBSIM (winch launch)
Chez Airseas et Syroco, j'ai utilisé des simulateurs multicorps développés from scratch, sans être en charge du développement :
- utilisant simulink
- utilisant pydy
Aujourd'hui j'aimerais bien reprendre le développement d'un simulateur multicorps, en python, julia ou javascript.
Le simulateur doit servir à la fois pour des études statiques, mais aussi pour de la visualisation et pour développer des algorithmes de contrôle.
Au niveau inspiration, il y a par exemple le simulateur SYD de VPLP.
Je me lance donc dans un petit benchmark des frameworks existants dont j'ai essayé de dresser une liste ci-dessous. Je n'ai pas trouvé de comparaison.
C++ seulement
- mbdyn
- Flightgear
C++ et binding python
- mujoco -> testé
- simbody/pysimtk -> pas trouvé comment installé
- xdyn-> pas multicorps
- project chrono/pychrono - > j'ai laissé tombé l'install
- rbdl -> pas réussi à installé avec poetry
- OpenSim -> pas réussi à installer avec poetry
Python
- SMBD/URAEUS -> pour les véhicules roulant
- pydy
- pybullet
- assimulo -> seulement un solveur
- pyFMI -> seulement interaction avec FMU
- pyDrake -> encore incomplet
- simupy -> plus dans le genre simulink
- APMMonitor/gekko -> plus optimisation de trajectoire
- exudyn -> flexible bodies
Julia
Voici aussi une liste de simulateurs spécialisés (Airborne Wind Energy) :
Ressources
https://www.moorepants.info/blog/npendulum.html
Maintenant que l'on comprend mieux la traînée des éléments sous-marins de liaison avec l'aile, arrive la grande question.
La liaison final du câble de retenu au foil optimal est-elle un simple câble sous-marin ou un système rigide aérien ?
Souvent la comparaison se fait sur le fait qu'un foil traversant a des problèmes avec la ventilation.
 |
| Source Syroco |
Mais je considère ici un autre système qui permettrait d'avoir le même foil sous-marin mais avec un shaft plus aérien.

Note : on peut aussi imaginer des combinaisons où la charge serait partagée entre un câble sous-marin de section réduite et un câble aérien, ce qui supprime en grande partie le moment fléchissant.
Câble sous-marin
C'est le concept utilisé par l'aile d'eau de Luc Armant et par le prototype de Syroco.
L'élément de liaison travaille essentiellement en traction, ce qui permet d'avoir une section réduite, la longueur du câble immergée est cependant assez longue :
$L= {depth \over sin(angle)}$
La longueur du câble tend vers l'infini, mais on peut considérer qu'une valeur d'angle de 30 ° avec l'horizontale est une bonne hypothèse (avec le gradient du vent, il faut mieux avoir le kite un peu en hauteur, d'autant plus aux allures portantes !)Câble aérien
C'est le cas du chien de mer de Didier Costes. Un bras faisant un L permet de transmettre les efforts en flexion. La longueur immergée peut se réduire à la profondeur h., mais la section doit être augmentée pour être suffisamment rigide.
Le résultat optimum va dépendre de la résistance des matériaux en traction VS en flexion.
Le dyneema va résister à environ 200kg pour 1mm de diamètre.
$\sigma_{dyneema}={ 2000 \over {\pi \over 4}}.1e6 =2.5GPa$
$F_{max} = \sigma_{dyneema} . \pi.{d^2 \over 4}$
$d=\sqrt{{4.F_{max} \over \sigma_{dyneema}.\pi}}$
Pour la rupture en flexion, j'ai demandé un coup de main à chatgpt en considérant une section elliptique comme approximation d'une corps profilée.
Le moment quadratique est donné par :

Le moment de flexion est donné par M=F.L
La condition de rupture est :

avec c=b distance maximale à partir de l'axe neutre à la surface de la section.
Application numérique
A une profondeur L=h=1m
Résistance à la rupture de l'acier: 500MPa
\[
F_{\text{max}} = \sigma_{acier} \cdot \frac{\pi}{4} \cdot b^2 \cdot \frac{a}{2h}
\]
\[
b = \sqrt{\frac{8 \cdot h \cdot F_{\text{max}}}{a \cdot \pi \cdot \sigma_{\text{acier}}}}
\]
Ratio of drag is given by the ratio of section x length
\[ \text{ratio} = \sqrt{\frac{2 \cdot \sigma_{\text{dyneema}} \cdot h}{a \cdot \sigma_{\text{acier}}}} \]
Le câble gagne si le ratio est grand.
Si on considère a=10cm, on a 100 sous la racine et un rapport 10
On peut aller jusqu'à un angle de 6°, on vise typiquement 30° de l'horizontal.
Il y a donc un net avantage à utiliser un câble sous-marin, surtout dans un environnement perturbé par des vagues dans lequel il faut prendre une marge sur la profondeur d'immersion du foil
La semaine dernière, j'ai pu vérifier que la traînée des lignes pouvait-être un vrai problème pour une aile d'eau, notamment à basse vitesse.
 |
| "Too much drag. No enough control". Historique fameux de commentaire sur le facebook de Syroco |
La formule de base donnant la traînée D linéique (N/m) d'un cylindre de rayon R est bien connue :
$$D = \rho \cdot R \cdot CD \cdot V^2$$
$$\rho$$: densité de l'eau en kg/m3
R: rayon en m (le facteur 1/2 a disparu avec D=2R)
V: vitesse en m/s
CD: coefficient de traînée sans dimension.
On voit ici l'importance de réduire en parallèle le nombre de câbles et le diamètre des câbles en optimisant leur section en fonction de l'effort en traction maximal visé (qui va lui même dépendre de la traînée).
La valeur du coefficient de traînée d'un cylindre infini rigide évolue avec le nombre de Reynolds. Un tableau a été établi par Lienhard.

On peut voir qu'une variation d'un facteur 10 est à attendre en fonction du nombre de Reynolds.
Si l'on vise des vitesse de 1 à 30m/s et des diamètres de 0.1 à 10mm, on obtient un nombre de Reynolds entre 100 et 300 000 (3e5 au delà de la crise de traînée). On peut donc s'attendre à un coefficient de traînée entre 0.2 et 1.4 si le câble est immergé et considéré comme rigide.
On peut noter qu'au passage de la crise de traînée, une multiplication du diamètre par 2 pourrait conduire à une division du coefficient de traînée par 5. On pourrait donc réduire la traînée en augmentant le diamètre ! Cela semble cependant difficilement utilisable en pratique.
Plusieurs phénomènes modifient cependant la traînée :
- dissipation d'énergie par la vibration du câble flexible (strumming),
- ventilation : de l'air s'introduit dans la dépression créé par le sillage du câble,
- vague d'étrave et sillage de surface.
L’occurrence de la cavitation est peu probable dans notre cas, le câble traversant la surface de l'eau, il va d'abord ventiler.
https://figshare.utas.edu.au/articles/thesis/Hydrodynamics_of_vertical_surface-piercing_cylinders/23251181?file=40975403
https://www.researchgate.net/publication/336146259_Hydrodynamics_of_Towed_Vertical_Surface-Piercing_Cylinders
Vibrations
La dissipation de l'énergie (par "grattage") a été étudiée dans le cadre des sonars notamment.
- Determination of normal drag coefficients for flexible cables
- The Strumming Vibrations of Marine Cables: State of the Art
- Dynamics of undersea cables
n : nombre de segments du câble vibrant dans la longueur du câble
f : fréquence des oscillations
L : longueur du câble
T : tension du câble
$$m_{c}$$ : masse linéique virtuelle du câble (masse + masse ajoutée)
$$L={n \over 2f} \cdot \sqrt{{T \over m_{c}}}$$
La fréquence de Strouhal
$$St={f \cdot d \over u}$$
avec
d: diamètre du câble
u: vitesse relative du fluide
La formule suivante a été proposée (mais pas validée par d'autres études) :
$$CDs=CD \cdot (1+10 \cdot ({d² \over m{c}})²)$$
La masse ajoutée pour un cylindre est connue, elle est égale à la masse d'eau correspondante.
La formule précédente peut ainsi être réécrite :
CDs=CD.(1+10*(d²/(pid²/4(rho + rho_water))²
CDs=CD.(1+160/pi²*(1/(rho + rho_water))²
On peut voir que l'utilisation d'un câble plus dense (acier 8 fois plus dense que le dyneema qui flotte très légremment) est susceptible de réduire la traînée d'un facteur 4 pour un même diamètre.
Ventilation
On évite généralement la ventilation sur les surfaces portantes, car elle entraîne une perte de portance souvent amplifiée par un décrochage caractérisé par une hystéresis se traduisant par une perte de contrôle (le fameux spin out pour les amateurs de funboard). Pour cela mieux vaut avoir une coque au-dessus de l'appendice, empêchant l'entrée d'air. Des "fences" sont également utilisés sur les foils.
Dans le cadre d'un câble dont on veut réduire la traînée, la ventilation peut cependant nous sauver : pour une forme non profilée (comme un cylindre) elle va réduire la surface d'aspiration par l'eau sur l'arrière du profil.
En effet, lorsqu'on regarde le coefficient de pression sur un cylindre, on constate que la surpression n'est limitée qu'à 30/45° autour du point de stagnation. Au-delà c'est une dépression. La dépression entre 45 et 90° a une composante vers l'avant qui est directement compensée par la dépression entre 90 et 135°. Comme pour une aile, on peut considérer qu'1/3 de la force est lié à la surpression et 2/3 à la dépression.
On peut donc espérer réduire la traînée d'un facteur 3, plutôt 2 en pratique.
On utilise déjà la ventilation pour réduire la traînée des coques. Les bateaux rapides ont ainsi un tableau arrière droit. A partir d'une certaine vitesse le tableau se retrouve émergé. Cela augmente cependant la traînée à basse vitesse. L'utilisation d'un redan est un compromis permettant d'avoir du volume permettant de réduire la traînée à basse vitesse dans la partie qui va être émergée à plus haute vitesse. L'utilisation de la ventilation ne dispense cependant pas d'avoir des formes avant profilés.
La position idéale de l'aile d'eau étant proche de la surface, il semble possible d'obtenir une ventilation sur plusieurs mètres de longueur, mais de l'ordre du mètre seulement de profondeur jusqu'au foil. C'est ce qui peut-être observé par exemple sur les vidéos du projet Syroco.
 | |
| Projet Syroco | |
 |
| Source syroco |
On voit que la ventilation conduit cependant à une perturbation de l'interface (sillage) et si elle réduit la traînée par rapport à un cylindre, cela ne veut pas dire que le cylindre est la forme optimale. En comparaison un kitefoiler allant à une vingtaine de nœuds, n'aura pas un tel sillage.
On constate aussi en regardant le sillage que la poche de ventilation semble plus importante sous la surface. Cela pourrait indiquer un stage de post base ventilation, indiquant que la poche de ventilation ne peut plus croître et donc qu'elle a atteint le foil.
Dans ces conditions, le coefficient de traînée est de 0.5.

La profondeur de la poche a été identifiée expérimentalement :
 |
| Hays 1947 |
Là encore la formule peut-être simplifiée, et on retrouve la formule de Bernoulli, avec un facteur d'efficacité réduit (0.286 au lieu de 0.5) qui doit correspondre au coefficient de pression à l'arrière du cylindre. La profondeur d'immersion ne dépend plus que de la vitesse.
$$L_{o}=0.286 \cdot {V^2 \over g}
Si on considère une profondeur du foil de 1m, la ventilation sera complète vers 10kt environ. Un coefficient correctif est peut-être à prendre en compte en fonction de l'inclinaison du cylindre par rapport à l'eau (vers l'avant ou sur le côté).
Idéalement, il serait possible de réduire la traînée encore plus en utilisant une section de carénage autour du câble permettant de réduire encore la traînée (mais le problème n'est pas simple et les solutions encore peu expérimentées).
Vendredi dernier, j'ai repris des essais d'aile d'eau !
Bateau support
Il a d'abord fallu trouver un bateau pour ces essais de foil tracté.
C'est le petit catamaran de plage familial démâté qui a servi de support. Pour les premiers essais, pas besoin d'aller vite, c'est pour l'instant un petit moteur électrique qui a servi et nous permettait d'aller à quelques nœuds : il n'y avait de toute manière pas de vent (pas assez pour faire du kiteboat) et nous n'étions que deux. Des essais de foil tracté plus rapides seraient aussi possibles en catamaran mâté (ou en kiteboat si nous étions au moins 3 à bord).
Le moteur électrique était fixé sur une chaise moteur (bricolage de planches de bois) monté dans le prolongement de la poutre arrière du catamaran.
Foil
Un foil de kitefoil a été utilisé (kfoil de Sroka V2). Le mât a été enlevé pour ne garder que l'avion (aile principale, fuselage, stabilisateur).
Le stabilisateur est plat, mais l'aile principale est courbée autour de l'axe x (longi), les extrémités de l'aile étant plus basses que le fuselage (ce qui permet d'éviter qu'elles ventilent lorsque le foil est fortement incliné, mais ne correspond pas à notre usage).
Le stabilisateur a un angle de calage différent de l'aile principale ce qui donne au tout un couple à cabrer. Cela peut aussi être utile pour une aile d'eau afin d'obtenir un comportement réflex (aile qui tend les lignes).
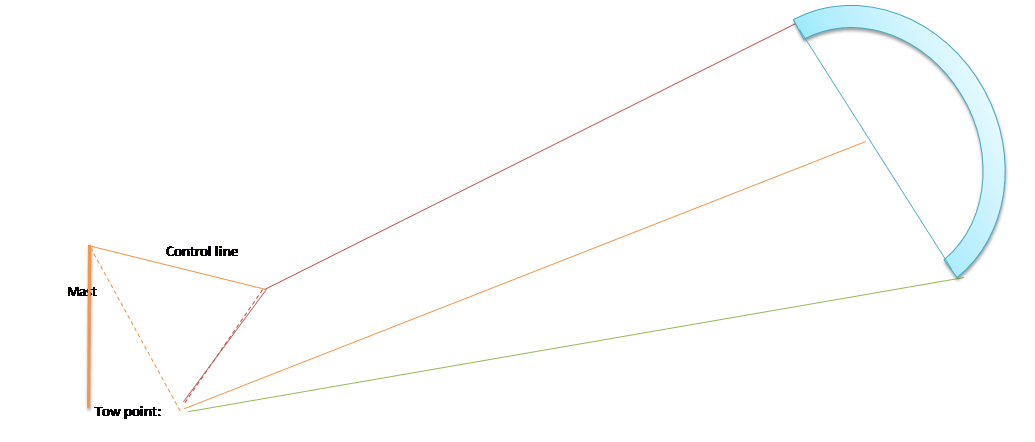
Bridage
Deux bouts de fil de fer ont été attachés autour des extrémités de l'aile principale et tenus par du ducktape pour ne pas glisser le long de l'aile.
Le foil a été utilisé de manière à ce que la portance tende le fil de retenue avec le profil fonctionnant dans le bon sens. Le dièdre est alors inversé, ce qui rendrait le foil instable s'il n'était attaché que sur son axe central (pas vérifié).
Une patte d'oie a été attachée sur ces fils de fer et relié par un bout à une extrémité d'une barre de contrôle. L'autre extrémité du bout a été fixée directement sur le foil, au niveau des trous pour les vis du mât, mais de manière à avoir du mou, les efforts étant repris par la patte d'oie (ce bout ne servant que de sécurité).
La longueur de la patte d'oie a été choisie de manière à être plus longue que le rayon de courbure du foil afin d'avoir un ensemble stable en roulis (par opposition au chien de mer de Didier Costes, pour lequel la patte d'oie est plus courte que la distance au métacentre, ce qui permet de réguler le foil en altitude à la surface de l'eau).
Un fil de fer a également été attaché au milieu du stabilisateur pour faire un point d'attache à l'arrière. Un bout relié à l'autre extrémité de la barre de contrôle permettait ainsi d'ajuster l'angle d'attaque et le lacet du foil (par torsion). Une longueur de ligne de 3-4 m a été utilisée.
Foil
 |
| Accroche du bout de sécurité au niveau du fuselage |
 |
| Fil de fer vert autour du stabilisateur et du fuselage et bout de pilotage blanc |
 |
| Bout violet sur le bord d'attaque (attaché au fil de fer sur l'extrados non visible de l'aile). Le scotch empêche le fil de fer de glisser. Celui sur l'autre demi-aile (qui était du côté du foil en bas) a lâché lors des essais. Une couche de scotch en dessous aurait permis de protéger un peu mieux le carbone du fil de fer. |
Mise à l'eau
Le lancement du foil s'est fait navire en marche. Les efforts étaient tout de suite important et pour le premier test, le foil est parti en marche arrière assez vite en traversant la fenêtre de vol jusqu"à se retrouver complètement à l'arrière du bateau. Peut-être faudrait il mieux stopper d'abord le bateau et commencer avec le foil en position basse, mais l'eau était trouble et la hauteur d'eau inconnue...
Le bridage avec plusieurs lignes complique la mise à l'eau. J'ai eu un emmêlage (lorsque j'ai modifié le bridage sur l'eau) et fini par défaire quelques nœuds et les refaire pour m'y retrouver.
Contrôle du foil
Même en relâchant complètement la tension sur la ligne arrière du foil, le foil ne remontait pas complètement en bord de fenêtre. Le stabilisateur a en effet un angle qui le rend déporteur ce qui a tendance à border l'aile principale (comme du réflexe sur une aile de kite). Sans tension sur la ligne arrière, impossible de diriger le foil grâce à la torsion.
Les points d'attache sur l'aile avant ont donc été avancés afin d'être sur le bord d'attaque de l'aile. C'était un peu mieux, mais la tension dans la ligne arrière restait insuffisante pour avoir un bon contrôle en torsion.
Les solutions envisagées pour un prochain essai sont donc :
Idée pour améliorer le contrôle :
- Améliorer la tension dans la ligne arrière
- réduire l'angle de calage du stabilisateur.
- avancer d'une manière ou d'une autre les points d'accroche avant.
- Contrôler le foil en roulis (comme pour un cerf-volant rigide, delta ou losange par exemple) en supprimant la patte d'oie et en reliant les deux fils sur une barre de contrôle en T
Il était cependant possible de contrôler le foil par à coup (un peu comme en kite dans le vent faible) en le faisant tourner de manière sur-bordée, puis en le relâchant une fois sur la bonne trajectoire.
Finesse du foil
Cela a permis de vérifier la (mauvaise) finesse de l'ensemble (le foil était à 45° vers l'arrière environ, soit une finesse de 1). Une bien meilleure finesse était cependant atteinte dès que le foil atteignait la surface et ventilait. Dur de dire si la ventilation concernait le foil ou les lignes de contrôle (une vidéo aurait été utile).
Idée pour améliorer la finesse :
- Utiliser des fils de section 2r réduite,
- Utiliser une baguette pour déporter le point d'attache de la partie de l'aile proche de la surface hors de l'eau et avoir un fil sur 3 hors de l'eau,
- Utiliser un carénage des lignes,
- Supprimer la ligne de sécu (il y a déjà 3 lignes avec des positions suffisamment extrême pour que les efforts soient réduits de plus d'1/3 en cas de la casse de l'une d'elle),
- Utiliser un L pour avoir un bras horizontal hors de l'eau pour transmettre la charge et les efforts de contrôle.
- Utiliser un foil avec du dièdre afin de se limiter à 1 au lieu de 2 fils avant (la charge varie en r**2 alors que la traînée varie en r, il y a donc intérêt à minimiser le nombre de ligne).
En comparaison avec les lignes dans l'air, dans l'eau on va avoir les mêmes efforts, donc la même section, mais une densité multipliée par 1000. La taille du foil peut-être réduite d'un facteur 30, et la longueur des lignes immergées également. On a donc un facteur 30 en comparaison de la proportion de la traînée des lignes dans l'eau et dans l'air.
Les essais se sont arrêtés suite à un fil de fer sur l'aile avant qui a glissé.
Idée pour améliorer la robustesse :
- Percer le foil (ça fait peur, c'est pas donné un foil et j'aimerais continuer à l'utiliser pour du kitefoil),
- Utiliser un L pour avoir un bras horizontal hors de l'eau pour transmettre la charge et les efforts de contrôle,
- pas donné un foil et j'aimerais continuer à l'utiliser pour du kitefoil),
- Strater le foil en coinçant un point d'accroche pour la ligne,
- Ajouter deux manchons sur les bouts d'aile avec des lignes les tendant vers le fuselage,
- Utiliser un autre foil
Je présente une idée d'aile d'eau avec une régulation mécanique que j'ai en tête depuis longtemps mais non partagée.
La position de l'aile d'eau idéale est proche de la surface pour ne pas trop tirer vers le bas (sauf en cas d'arrachement vers le haut).
On imagine une aile d'eau avec une aile principale prolongée par deux petites ailes à chaque extrémité.
Ces petites ailes peuvent tourner autour de l'axe transversal de l'aile d'eau.
Grâce à un système de tringlerie, elles sont toutes les deux reliées au safran.
En navigation sous l'eau en ligne droite, les deux ailes reçoivent les mêmes efforts et le safran est droit. Si jamais l'aile d'eau se rapproche de l'eau, la demi-aile la plus proche de la surface va sortir de l'eau. Un différentiel d'effort va apparaître entre l'aile du haut et celle du bas. Ce différentiel va activer le safran et refaire plonger l'aile d'eau.
Avec un peu de chance, l'effet de sol inverse pourra permettre que cet effet soit ressenti avant même que l'aile haute sorte de l'eau.
Que se passe-t-il maintenant en virage ? Ce dispositif risque-t-il de déstabiliser l'aile d'eau? Au contraire, la vitesse étant plus élevé sur l'aile à l'extérieur du virage, cela va stabiliser l'aile d'eau pour aller droit !
Hâte de tester le jour où je deviendrai meilleur bricoleur (ou meilleure pour faire des simulations informatiques) !
Edit 27/10/2024
J'ai décrit le système à mon amie, qui a dessiné l'axe de rotation autour de l'axe x au lieu de l'axe y.

Alors que le système que j'imaginais est plus comme ceci.

Ce qui est intéressant, c'est que le système avec la rotation autour de l'axe x présente des avantages. Le profil travaille également en portance. Mais la portance va rester constante au cours de la rotation (un peu comme une hélice).
Quelques (vieilles) images pour montrer une évolution du système de barre déportée utilisé sur L'Dorado.
Le concept a initialement été développé par Trevor Jack, on l'a fait évolué ensemble et la dernière mouture a été discutée avec Xavier Labaume mais jamais testée.
Par rapport à une navigation en kite classique, on veut transmettre la traction du kite au bateau pour une navigation en puissance.
La solution la plus simple est celle proposée par kitetender. Le chicken loop (standard en kite) est directement attaché à un anneau sur le pont au milieu du bateau.
 |
| Système du kitetender. Source |
Cependant le faire dès le départ sur la plage peut parfois être compliqué, soit car le vent est irrégulier soit car il est difficile d'accéder à la plage avec le bateau.
Le système présenté ci-dessous présente deux évolutions :
- Possibilité de transfert de la traction du kiteur au bateau
- Possibilité de séparer la position du point de traction (lignes avants) de la position du pilote (généralement lignes arrières)
Transfert de la traction du kite
Il est donc fréquent sur les petits kiteboats de commencer par accrocher l'aile au pilote, qui va décoller l'aile (avec la mobilité permettant de parer aux déventes en courant vers le vent). Une fois l'aile en l'air, le bateau est mis à l'eau par l'équipier, le pilote monte à son tour sur le bateau qui peut alors s'éloigner du bord (avec toujours un risque d'éjection du pilote...). Parfois le bateau reste même au large car il y a trop de vagues, et le pilote le rejoint par exemple en twintip, puis monte à bord.
Il faut ensuite transférer la traction du kite sur le bateau. Cela peut-être fait en décrochant l'aile du kiteur, mais c'est risqué car l'aile n'étant plus attachée pourrait partir (il restera le leash s'il n'a pas été décroché en même temps et s'il est présent).
Le système présenté dans la suite permet de parer à cette éventualité en permettant d'attacher l'aile au bateau en parallèle sans se décrocher. Comme en escalade l'idée est d'avoir deux mousquetons sur un anneau. Il faut toujours qu'au moins un mousqueton soit attaché (on pourrait aussi avoir deux anneaux et un mousqueton, mais cela présente un risque à l'ouverture du mousqueton).
Dans notre cas, l'anneau est donc en bas des lignes avant du kite (lignes reprenant la majorité de la traction).
Un mousqueton est accroché sur un chicken loop avec largueur qui sera accroché au harnais du pilote (sécurité pour pouvoir larguer, même sous tension).
L'autre mousqueton est accroché au bateau avec une longueur de bout suffisante pour permettre au pilote de pouvoir se placer proche tout en étant à l'aise pour continuer à piloter son aile.
Une fois les deux mousquetons accrochés, le pilote soulève ses fesses pour transférer la traction au bateau et décrocher son mousqueton. Cette étape pouvant être difficile, il est possible de prévoir un palan au niveau du mousqueton du bateau pour ramener l'aile plus proche et décrocher sans soulever ses fesses.
Séparation des points d'accroche des lignes avants et arrières
Sur un bateau large comme un catamaran, on peut avoir besoin de déporter la position du pilote par rapport à la position du point d'accroche. Cela peut-être utile soit pour avoir une meilleure assise, soit pour améliorer l'équilibre ou les performances du bateau.
Une solution existante est de faire passer les lignes arrières dans des poulies de renvoi avant de les envoyer vers une barre. Cette solution fait cependant perdre les sensations de pilotage (poulie ajoutant des frottements et perte de l'information de la position du kite dans la fenêtre).
Le système proposé ci-dessous n'a pas cet inconvénient : les lignes avants ont été sorties du trou au milieu de la barre de kite et vont directement du kite au pilote.
Cela engendre cependant un nouveau problème : pour se déplacer, il faut que le différentiel de longueur de ligne suive. Cela peut-être fait à la marge avec le système de trim du kite, mais son amplitude est en général assez limitée (même si rien ne la limite vraiment si ce n'est le risque d'un mauvais réglage. Le système de trim a donc été enlevé et a été remplacé par un système équivalent avec une plus grande longueur (à base d'un palan et d'un taquet coinceur clamcleat).
L'autre problème est le risque de perdre la barre. Pour pallier ce problème la barre est attachée au bout permettant de faire le réglage du palan dont l'extrémité est accrochée au niveau de l'anneau. Lorsque le bout de trim est lâché, le kite est loin, et le pilote proche du point d'accroche. Lorsque le bout de trim est repris, le kite se rapproche et le pilote peut se reculer sur le bateau.
Un dernier problème de cette solution est la variation du différentiel de longueur en fonction de la position de l'aile dans la fenêtre de vol.
Une solution (non testée) à ce problème pourrait être de faire passer les lignes arrières dans des petites poulies fixées sur les lignes avants. Souvent cela est fait au niveau du point d'accroche des lignes avant, mais l'idée ici est de le faire à quelques mètres au dessus du point de traction.
Le système est décrit dans les photographies suivantes :






Quelques défauts de ce système sont déjà prévisibles, mais il faut maintenant tester ce système pour trouver tous ses points faibles :
- pas de possibilité de faire des kiteloops et de faire tourner simplement la barre pour défaire les tours comme en kite
- le pilote n'est plus au près du largueur
J'essaie ici d'aller plus en avant dans le concept du foil rotatif, déjà présenté sur ce blog, mais juste en mode texte.
Pour commencer j'ai essayé de faire un schéma cinématique. Pour cela, j'ai de nouveau cherché les outils existant et j'ai trouvé le logiciel openmeca qui permet assez rapidement de réaliser un schéma cinématique, de l'habiller de géométrie très basique, de faire une animation cinématique ou même une simulation dynamique. Malheureusement un petit bug dans l'enregistrement du fichier de sauvegarde ne me permet pas de présenter une animation pour l'instant, mais voici une première image du concept.

Le plan marron au dessus représente une planche à voile ou un bateau.
La partie en rose représente un mât de foil vertical ("shaft" en anglais).
La partie en violet représente le foil rotatif, relié au shaft par une liaison pivot.
Le foil est excentré par rapport à l'axe de rotation grâce à un petit mât, afin de s'orienter sous l'effet de sa portance.
On considère dans un premier temps que la densité du foil est égale ou proche de celle de l'eau, ce qui revient à dire que les forces volumiques (de gravité et d'Archimède) sont négligées devant les forces hydrodynamiques.
Si l'axe de rotation est parallèle à l'écoulement, il y a une invariance par rotation et le foil étant symétrique droite/gauche, il peut être à l'équilibre dans n'importe quelle position.
Si l'on considère également que le profil du foil est symétrique et l'angle d'attaque par rapport à l'axe de rotation nul, la portance sur le foil est alors nulle. On peut s'attendre à ce que l'angle de rotation du foil soit marginalement stable (la vitesse de rotation tend vers zéro sous l'effet de la traînée et de la portance créée sur le mât, mais la position peut dériver sous l'effet de la moindre perturbation).
On considère maintenant une position initiale du foil vers le haut (le foil fait un T à l'endroit). Et l'on vient considérer l'effet d'un changement d'assiette de l'ensemble.
Si le "nez" de l'axe de rotation va vers le haut ("pitch up"), une portance sera créée sur le foil orientée vers le haut. La configuration reste symétrique, ce qui permet de dire que l'on reste à l'équilibre. Cette position d'équilibre est stable. Pour s'en convaincre, imaginons une perturbation de la position du foil à 90° vers la droite. Le mâtereau est alors à l'horizontale et le foil à la verticale. l'angle d'attaque du foil est devenu nul, mais le mâtereau a maintenant un angle d'attaque ce qui crée une portance vers le haut et un retour vers la position d'équilibre.
Si le "nez" de l'axe de rotation va vers le bas ("pitch down"), une portance vers le bas sera créée sur le foil. Mais cette fois, cet équilibre est instable. Il existe une nouvelle position d'équilibre foil tête en bas.
On voit ici que c'est le mâtereau qui donne la stabilité grâce à une double action :
- création d'un bras de levier
- portance créée par une surface transversale au foil
D'autres configurations stables sont envisageables en reprenant ces deux principes.
On peut également vouloir au contraire compenser l'effet du mâtereau en rajoutant une pièce similaire du côté opposé au foil.
On considère maintenant l'effet d'un angle de calage du foil.
Si l'on reprend le scénario ou l'axe de rotation est parallèle au flux, si on rapproche le bord de fuite de l'axe de rotation on va créer une portance vers l'extérieur. Cette portance étant tangentielle, elle ne modifie pas la symétrie et n'a pas d'effet direct sur l'équilibre ou la stabilité.
On pourrait donc de même obtenir une force tangentielle vers l'intérieur en éloignant le bord de fuite de l'axe de rotation.
Edit 2024/10/22 :
le foil n'a pas besoin d'être au bout du mâtereau, même si intuitivement cela devrait aider à la rotation.
certains m'ont fait remarquer que le tirant d'eau augmentait (à cause du mâtereau).
On peut aussi imaginer d'avoir le mâtereau un plus haut et de transmettre la rotation par un système de courroie, mais cela complexifie le système et rajoute des frottements.
To be continued.
Après quelques années de pause, je reprends ce blog commencé il y a plus de 10 ans.
Depuis 10 ans, il y a eu des progrès considérables sur le sujet du pilotage automatique des cerfs-volants que ce soit pour la production d'électricité, ou la traction principale (kiteboat) ou auxiliaire des bateaux.
A quelqu'un qui s'intéresserait aux actualités sur le sujet, je recommanderais les deux sites suivant :
- Forum AIrborne Wind Energy https://forum.awesystems.info/
- Groupe facebook kiteboat https://www.facebook.com/groups/kiteboat
Les premiers systèmes industriels commencent (enfin) à faire leur preuve en AWE avec les premières connexions aux réseaux et la validation des courbes de performances, mais de nombreuses entreprises ont coulé entre-temps (Makani, KPS, Ampyx power) ou ont connu des phases difficiles de réduction de personnel (SkySails, Airseas, ...).
La phase de développement commercial aura-t-elle lieu ?
Du côté des kiteboats, WingIt propose un pilote automatique sur étagère. Le système a pu être utilisé par Francisco Lufihna sur une traversée de l'Atlantique, non sans quelques difficultés (le pilotage était finalement principalement au joystick). Le système devait être commercialisé avec le yacht Silent 60, mais la compagnie autrichienne a fait faillite.
Maloric propose également un système pour les petits bateaux (encore en développement).
Le projet RaceForWater s'est arrêté avec le Covid. Pas de kite SkySails sur le nouveau projet Modx70 (notamment développé par d'anciens naviguants).
Beyond The Sea a récemment réalisé une première navigation hauturière d'Arcachon à Lorient sous pilote automatique de l'aile birdkite à bord du Seakite, déjà testée auparavant sur le Deo Juvante.
De mon côté, j'ai pu travailler sur le pilotage du kite chez Airseas (pour la traction auxiliaire des navires de commerce).
Chez Syroco, j'ai pu travailler sur le pilotage automatique du cerf-plongeant et sur le contrôle par joystick comme je le faisais sur la plage il y a 10ans, mais de manière beaucoup plus robuste pour contrôler ce qui est probablement la première maquette de kiteboat pilotable. Le projet de record de vitesse est malheureusement arrêté faute de sponsor.
Auparavant j'avais pu travailler avec Groupama Team France sur le contrôle automatique des foils qui est devenu standard sur les voiliers avec le TF35 et maintenant l'AC40. Ces systèmes électroniques étaient coûteux et réservés aux grands bateaux, mais de ce côté une miniaturisation est en marche (voir rctestflight, zyx,.foilchemy..).

Aujourd'hui j'aimerais cependant relancer le concept d'un kiteboat à foil avec régulation (mécanique ou automatique) du foil et éventuellement du kite (les constantes de temps ne sont pas les mêmes). Le projet allemand cargokite propose ce concept pour du transport de container, mais je pense que c'est à trop grande échelle pour ce concept.

Le projet de Julien Hatin de mini à foil est aussi assez proche, mais n'aura pas de pilote automatique du kite (en tout cas pour les courses). Le concept n'a pas encore été dévoilé mais a pu être testé en navigation tractée (maquette et mini 6.50).

En plus de ces projets, je souhaiterais que le foil soit orientable pour s'opposer à la traction du kite, comme sur l'aile d'eau, sur Vestas Sail Rocket ou sur SP80.
J'avais déjà présenté l'idée de foil rotatif sur ce blog, mais seulement en texte.
Voici quelques unes des étapes de développement que j'envisage :
- Faire une maquette télécommandé d'aile d'eau avec un petit mât, permettant de passer d'une navigation archimédienne quand le vent est faible à une aile d'eau quand le vent est fort.
- Faire un dessin d'un catamaran équipé du foil rotatif
- Développer un simulateur multicorps (en Julia ?).
Mes ressources sont cependant assez limitées (ressources personnelles + 1 jour par semaine libéré après passage à 4/5).
Je recherche donc aussi des applications potentielles susceptibles de me fournir une contrainte sous la forme d'un engagement à sortir quelque chose.
J'ai le droit de facturer, mais malheureusement, j'ai un blocage de Syroco sur tout ce qui est lié à l'efficacité énergétique et la performance dans le domaine du maritime, contrainte qui pourrait cependant être levée en fonction des projets.
Voici cependant les applications que j'envisage :
- Courses à la voile (mini/record/mini transat)
- Météorologie (voir Aéroclipper).
- Recreationnal craft
- Yachting
- Transport de drone de livraison de pièces détachées ou médicament en mer
- Transport de passager (voir sailcoop)
- Production d'électricité (voir Farwind)
- Production d'électricité pour la recharge de drone (voir vhquatrevingtreize)
Note : article écrit en 2018, mais jamais publié.
Le bateau vole
Le bateau accélère bien dès qu'il vole et les sensations de vitesse sont au rendez-vous, notamment pour celui qui pilote l'aile.
Le bateau semble cependant saturer rapidement en vitesse
Stabilité du vol
Le vol n'est pas très stable notamment à cause du palpeur situé en arrière du foil.
Capacité à manœuvrer seul
C'est compliqué, mais le bout faisant le tour du bateau et relié au safran doit le permettre
Casse-matériel
Les foils sont solides : malgré un passage sur les cailloux, et quelques minutes passées sur un banc de sable, ils n'ont pas bougé. L'un d'eux avait cependant accusé le coup après une collision avec une raie manta en Australie.
Les points d'accroches sur le bateau ont tenu alors qu'on les pensait un peu léger. Lorsqu'il y eu une surtension, c'est le kite lui même qui a cassé en premier. Malheureusement difficile de le réparer... L'utilisation d'un fusible mécanique semble donc à considérer, principalement afin de préserver le matériel.
Sécurité et chavirage
Nous n'avons pas eu d'inquiétude à ce sujet. Cependant en l'absence de mât retourner le bateau serait vraiment problématique. Revenir à la rame le bateau à l'envers semble cependant possible. Avec un peu de chance, le moteur pourrait être récupéré ?
Homme à la mer
Cela ne nous est malheureusement pas arrivé. Etant donné la difficulté à piloter seul, le mieux serait peut-être pour la personne reste à bord de mettre le kite à l'eau.
Lancement et récupération du kite
C'est vraiment un des points faibles du concept actuel. Des solutions existent (mât, aile multribridage).
Empennage
Pas trop de soucis. Dans le vent fort, nous avions besoin de lâcher la patte d'oie. Un rail pourrait remplacer ce système, peut être légèrement courbé vers l'avant. Mais niveau rapport qualité/prix le système était très satisfaisant.
Virement de bord
Je ne sais plus si nous avons même essayé



https://katakite972.forumactif.org/
Treuil motorisée imprimable en 3D (pour un petit cerf-volant monofil)
Openkite (dépôt alternatif) est librairie ROS implémentée en C++ d'un contrôleur de vol open source par Petr Listov de l'EPFL qui concentre maintenant ses efforts sur un outil de contrôle PolyMPC.
Kiteboatspeed
https://www.leparisien.fr/yvelines-78/montigny-le-bretonneux-78180/montigny-le-bretonneux-leur-bateau-pourrait-concourir-aux-jeux-de-2024-12-10-2017-7327131.php
Kitamaran était un projet de mini 6.50 avec un kite, et un beau projet de catakite par Charles Boulenger. Le site internet a disparu et le projet semble bien arrêté, mais cela m'a permis de découvrir le projet israélien de Baliwind
Décollage aile à caisson depuis l'eau.
Kiwee
Veille Airborne Wind Energy
L'ancien forum ayant fermé, il faut maintenant aller sur https://forum.awesystems.info/
Reel in/reel out
https://flyozone.com/paragliders/en/products/gliders/xxlite-2/info/
Transport maritime à la voile
https://www.lesechos.fr/pme-regions/actualite-pme/0301441172319-yves-parlier-laile-de-kitesurf-pour-tirer-les-bateaux-2162001.php
Humanity Ship
Skysails
https://www.researchgate.net/publication/320281771_Modelling_approach_and_numerical_tool_developments_for_kite_performance_assessment_and_mechanical_design_application_to_vessels_auxiliary_propulsion
https://www.researchgate.net/publication/323696726_A_constraint-free_flight_simulator_package_for_airborne_wind_energy_systems
http://moretonbaykiting.com.au/kiteboats
D'après une étude, des supercapacités à base de nanotube de carbone pourraient rendre les accéléromètres bien plus précis. de quoi imaginer se passer d'autres capteurs et se contenter de navigation à l'estime.
https://c4science.ch/diffusion/1517/
https://github.com/adrienemery/kite-power
Record kite
https://www.flickr.com/photos/un_photo/6029204185
Minesto
https://minesto.com/news-media/deep-green-mgs-buoy-installed-holyhead-deep
UNAV
Gabriel Bousquet
http://news.mit.edu/2018/albatross-robot-takes-flight-0518
Kitepower 100kW
https://kitepower.nl/a-40-square-meter-success/
KBW 2 (Kite Buggy Water 2)
Un kiteboat espagnol par kite Proki
https://www.youtube.com/watch?v=Mxv3QvVr_gw
Il s'intéresse aussi à la stabilité et au contrôle automatique comme le montre une vidéo d'un kite à cellule asservi mécaniquement grâce à un peson rappelant la partie aérienne d' l'Aile d'eau de Luc Armant.
https://www.youtube.com/user/43efrevfrd/videos
Skysails Yacht
https://www.youtube.com/watch?v=dDnmJ-hYRzI
blue conf http://www.blueforum.org/?p=5101
Parlier
https://www.surfrider.eu/le-blog/yves-parlier-bateaux-cerfs-volants/
https://www.20minutes.fr/planete/2262339-20180430-rehabiliter-voile-transport-maritime-idee-vent où l'on parle également de TOWT et airseas
https://www.youtube.com/watch?v=kLtv1c96_ZY&feature=share
https://www.capital.fr/lifestyle/ces-idees-un-peu-folles-pour-que-les-bateaux-ne-polluent-plus-1294458





Le pilote est sur un siège coulissant d'avant en arrière. Le bordé-choqué se fait avec les pieds en appui sur un support fixe, le pilotage avec des leviers de part et d'autre d'une barre en rotation autour d'un axe vertical sous le siège
Le tout est fixé sur une plateforme pivotante.
https://youtu.be/3AO3xrGAoZE?t=49
Les leviers sont aussi équipés de frein qui servent probablement pour le lancement de l'aile https://youtu.be/Yjm9nvxOWGQ?t=52




{kind=link}