เอดจ์คอมพิวเตอร์ + AI = เอดจ์เอไอ ( Edge AI ) : ปัญญาประดิษฐ์ที่ชาญฉลาดกว่า เร็วกว่า และปลอดภัยกว่า

Edge AI คือการนำเอาปัญญาประดิษฐ์ (AI) มาประยุกต์ใช้กับอุปกรณ์ปลายทาง (Edge device) เช่น อุปกรณ์ IoT (Internet of Things) อุปกรณ์เคลื่อนที่ อุปกรณ์อุตสาหกรรม หรืออุปกรณ์เครือข่าย หรือแม้กระทั่งมือถือ ยุคใหม่ เพื่อทำการวิเคราะห์ข้อมูลและประมวลผลข้อมูลแบบเรียลไทม์ (Real-time) โดยไม่ต้องส่งข้อมูลไปประมวลผลบนคลาวด์ (Cloud)
ตัวอย่างของ Edge AI เช่น- กล้องวงจรปิดอัจฉริยะ (Smart camera) ที่สามารถใช้ AI เพื่อตรวจจับใบหน้า วัตถุ หรือการเคลื่อนไหว
- อุปกรณ์ตรวจจับมลพิษทางอากาศ (Air quality sensor) ที่สามารถใช้ AI เพื่อตรวจสอบคุณภาพอากาศและแจ้งเตือนหากมีมลพิษเกินค่ามาตรฐาน
- อุปกรณ์ทางการแพทย์ (Medical device) ที่สามารถใช้ AI เพื่อวินิจฉัยโรคหรือติดตามอาการของผู้ป่วย
Edge AI มีข้อดีหลายประการ เช่น
- ลดเวลาแฝง (Latency) ในการประมวลผลข้อมูล เนื่องจากข้อมูลไม่ต้องถูกส่งไปประมวลผลบนคลาวด์
- เพิ่มความปลอดภัยของข้อมูล เนื่องจากข้อมูลไม่ถูกส่งไปเก็บบนคลาวด์
- ปรับปรุงประสิทธิภาพการใช้พลังงาน เนื่องจากอุปกรณ์ปลายทางไม่จำเป็นต้องส่งข้อมูลจำนวนมากไปยังคลาวด์
ความแตกต่างระหว่าง Edge AI และ Cloud AI สรุปได้ดังนี้
Edge AI และ Cloud AI มีข้อดีและข้อเสียที่แตกต่างกัน ดังนั้นจึงควรเลือกเทคโนโลยีที่เหมาะสมกับการใช้งาน เช่น หากต้องการประมวลผลข้อมูลแบบเรียลไทม์และให้ความสำคัญกับความปลอดภัยของข้อมูล Edge AI จะเป็นตัวเลือกที่ดีกว่า แต่ถ้าต้องการประมวลผลข้อมูลที่มีปริมาณมากและต้องการเข้าถึงข้อมูลได้จากทุกที่ Cloud AI จะเป็นตัวเลือกที่ดีกว่า

ยกตัวอย่างจากมือถือรุ่นใหม่อย่าง Samsung S24 ที่สามารถประมวลผลเสียงและแปลได้ทันทีทันใด หรือ Seemless Translation นั้น เป็นตัวอย่างหนึ่งของการนำ Edge AI มาใช้ในชีวิตประจำวัน เทคโนโลยีนี้ช่วยให้ผู้ใช้สามารถแปลภาษาได้แบบเรียลไทม์โดยไม่ต้องเชื่อมต่ออินเทอร์เน็ต ซึ่งมีประโยชน์อย่างมากสำหรับการเดินทางท่องเที่ยวหรือติดต่อสื่อสารกับผู้คนจากต่างวัฒนธรรม

แนวโน้มของ Edge AI ในอนาคตจะมุ่งเน้นไปที่การพัฒนาให้มีประสิทธิภาพมากขึ้น สามารถประมวลผลข้อมูลได้อย่างรวดเร็วและแม่นยำยิ่งขึ้น เพื่อให้สามารถรองรับการใช้งานที่หลากหลายและซับซ้อนมากขึ้น เช่น
- การประมวลผลภาพและวิดีโอแบบเรียลไทม์ เช่น การตรวจจับใบหน้า วัตถุ หรือการเคลื่อนไหว
- การประมวลผลเสียงและภาษาแบบเรียลไทม์ เช่น การแปลภาษา การจดจำเสียง หรือการสร้างข้อความ
- การประมวลผลข้อมูลในอุปกรณ์ IoT เช่น การควบคุมอุปกรณ์อัจฉริยะ การติดตามข้อมูลสุขภาพ หรือการวิเคราะห์ข้อมูลการผลิต
นอกจากนี้ Edge AI ยังจะผสานรวมกับเทคโนโลยีอื่นๆ เช่น 5G, Blockchain และ Quantum Computing เพื่อเพิ่มประสิทธิภาพและขีดความสามารถในการใช้งานมากยิ่งขึ้น
ตัวอย่างการใช้งาน Edge AI ในอนาคตที่อาจเกิดขึ้น ได้แก่
- รถยนต์ไร้คนขับ จะใช้ Edge AI เพื่อประมวลผลข้อมูลจากเซ็นเซอร์ต่างๆ เช่น กล้อง เรดาร์ และ LiDAR เพื่อควบคุมรถยนต์ให้เคลื่อนที่ได้อย่างปลอดภัย
- หุ่นยนต์อุตสาหกรรม จะใช้ Edge AI เพื่อทำงานอัตโนมัติและตัดสินใจได้อย่างชาญฉลาด
- เมืองอัจฉริยะ จะใช้ Edge AI เพื่อรวบรวมและวิเคราะห์ข้อมูลต่างๆ เช่น ข้อมูลจราจร ข้อมูลสิ่งแวดล้อม และข้อมูลความปลอดภัย เพื่อปรับปรุงคุณภาพชีวิตของประชาชน
จะเห็นได้ว่า Edge AI มีศักยภาพที่จะพลิกโฉมโลกของเราไปอย่างสิ้นเชิง โดยเทคโนโลยีนี้จะช่วยให้เราใช้ชีวิตได้อย่างสะดวกสบายและปลอดภัยมากขึ้น
ในแง่ของ Generative AI ซึ่งในปัจจุบันความก้าวหน้าของ ระบบรู้สร้าง นี้ได้เข้ามาใช้ประโยชน์ในชีวิตประจำวันเรามากขึ้นเรื่อยๆ ไม่ว่าจะในที่ทำงานเป็นทำงานร่วมกับ MS Office หรือ ค้นหาข้อมูลหรือ แนวทางต่างๆ ซึ่งในส่วนที่มาเชื่อมต่อกับ Edge AI ซึ่งสามารถสร้างสรรค์งานสิ่งต่างๆ ได้หลากหลายขึ้น
อนาคตของ Edge AI ในรูปแบบ Generative AI มีโอกาสพัฒนาต่อเนื่องได้หลายทิศทาง ดังนี้
การพัฒนาประสิทธิภาพของอุปกรณ์ อุปกรณ์ Edge AI ในปัจจุบันยังไม่มีประสิทธิภาพเพียงพอที่จะรองรับการใช้งาน Generative AI ที่ซับซ้อน เช่น การสร้างภาพ วิดีโอ เสียง หรือข้อความที่มีคุณภาพสูง อย่างไรก็ตาม การพัฒนาเทคโนโลยีด้านชิปเซ็ตและหน่วยความจำแบบใหม่จะช่วยให้อุปกรณ์ Edge AI มีพลังประมวลผลและพื้นที่จัดเก็บข้อมูลมากขึ้น ซึ่งจะส่งผลให้ Generative AI ทำงานได้มีประสิทธิภาพมากขึ้น
การพัฒนาอัลกอริทึม อัลกอริทึม Generative AI ในปัจจุบันยังทำงานได้ไม่สมบูรณ์แบบ เช่น อาจสร้างภาพหรือวิดีโอที่มีจุดบกพร่อง หรืออาจสร้างข้อความที่เข้าใจยากหรือไม่เป็นธรรมชาติ อย่างไรก็ตาม การพัฒนาอัลกอริทึมใหม่ ๆ จะช่วยให้ Generative AI ทำงานได้แม่นยำและสร้างสรรค์มากขึ้น
การผสานรวมกับเทคโนโลยีอื่น ๆ Generative AI ยังสามารถผสานรวมกับเทคโนโลยีอื่น ๆ เช่น 5G, Blockchain และ Quantum Computing เพื่อเพิ่มประสิทธิภาพและขีดความสามารถในการใช้งานมากยิ่งขึ้น เช่น การใช้ 5G เพื่อส่งข้อมูลภาพและวิดีโอแบบเรียลไทม์ไปยังอุปกรณ์ Edge AI หรือการใช้ Blockchain เพื่อปกป้องข้อมูลส่วนตัวและความปลอดภัยของข้อมูล
ตัวอย่างการใช้งาน Edge AI ในรูปแบบ Generative AI ในอนาคตที่อาจเกิดขึ้น ได้แก่
การสร้างภาพและวิดีโอแบบเรียลไทม์ อุปกรณ์ Edge AI สามารถใช้ Generative AI เพื่อสร้างภาพและวิดีโอแบบเรียลไทม์ เช่น การสร้างภาพเสมือนจริง (Virtual Reality) หรือการสร้างภาพเสริมความเป็นจริง (Augmented Reality) เพื่อช่วยให้ผู้ใช้งานสามารถมองเห็นโลกรอบตัวได้ในรูปแบบใหม่ ๆ
การแปลภาษาแบบเรียลไทม์ อุปกรณ์ Edge AI สามารถใช้ Generative AI เพื่อแปลภาษาแบบเรียลไทม์ เช่น การแปลภาษาแบบปากเปล่าหรือแบบข้อความ ซึ่งจะช่วยให้การสื่อสารระหว่างผู้คนจากต่างวัฒนธรรมเป็นไปได้อย่างราบรื่น
การสร้างเนื้อหาสร้างสรรค์ อุปกรณ์ Edge AI สามารถใช้ Generative AI เพื่อสร้างเนื้อหาสร้างสรรค์ เช่น การสร้างเพลง บทกวี หรือผลงานศิลปะ ซึ่งจะช่วยให้ผู้คนสามารถสร้างสรรค์ผลงานได้อย่างง่ายดายและรวดเร็ว
จะเห็นได้ว่า Edge AI ในรูปแบบ Generative AI มีศักยภาพที่จะพลิกโฉมโลกของเราไปอย่างสิ้นเชิง โดยเทคโนโลยีนี้จะช่วยให้เราใช้ชีวิตได้อย่างสะดวกสบายและสร้างสรรค์มากขึ้น ซึ่งการนำไปใช้เพื่อให้เกิดประโยชน์ นั้น เราควรมี AI Ethic เพื่อครอบคลุมการใช้งาน และ บทบาทที่จัดเจนมากยิ่งขึ้น หลายๆประเทศ ก็มีมาตรฐาน ของ AI โดยกำหนด ISO BS/IEC 42001:2023 ซึ่งหลายๆ บริษัทได้นำมาปรับใช้กันบ้างแล้ว อนาคตของ Edge AI ขึ้นอยู่กับ ท่านผู้อ่าน และ การนำไปใช้ให้เกิดประโยชน์ แก่ตัวเอง และ คนรอบข้าง
บทสรุป
Edge AI เป็นเทคโนโลยีที่มีศักยภาพที่จะพลิกโฉมโลกของเราไปอย่างสิ้นเชิง โดยเทคโนโลยีนี้จะช่วยให้เราใช้ชีวิตได้อย่างสะดวกสบายและปลอดภัยมากขึ้น Edge AI มีแนวโน้มที่จะพัฒนาอย่างต่อเนื่อง โดยมุ่งเน้นไปที่การพัฒนาประสิทธิภาพให้มากขึ้น สามารถประมวลผลข้อมูลได้อย่างรวดเร็วและแม่นยำยิ่งขึ้น เพื่อให้สามารถรองรับการใช้งานที่หลากหลายและซับซ้อนมากขึ้น
การประยุกต์ใช้ Edge AI ในปัจจุบันมีให้เห็นในหลากหลายด้าน เช่น การดูแลสุขภาพ การผลิต การเกษตร คมนาคมขนส่ง และเมืองอัจฉริยะ ในอนาคต Edge AI จะเข้ามามีบทบาทสำคัญในหลาย ๆ ด้านของชีวิตเรามากยิ่งขึ้น เช่น
- รถยนต์ไร้คนขับ จะใช้ Edge AI เพื่อประมวลผลข้อมูลจากเซ็นเซอร์ต่างๆ เช่น กล้อง เรดาร์ และ LiDAR เพื่อควบคุมรถยนต์ให้เคลื่อนที่ได้อย่างปลอดภัย
- หุ่นยนต์อุตสาหกรรม จะใช้ Edge AI เพื่อทำงานอัตโนมัติและตัดสินใจได้อย่างชาญฉลาด
- เมืองอัจฉริยะ จะใช้ Edge AI เพื่อรวบรวมและวิเคราะห์ข้อมูลต่างๆ เช่น ข้อมูลจราจร ข้อมูลสิ่งแวดล้อม และข้อมูลความปลอดภัย เพื่อปรับปรุงคุณภาพชีวิตของประชาชน
จะเห็นได้ว่า Edge AI มีศักยภาพที่จะสร้างการเปลี่ยนแปลงครั้งใหญ่ให้กับโลกของเรา โดยเทคโนโลยีนี้จะช่วยให้เรามีชีวิตที่ดีขึ้นและยั่งยืนมากขึ้น
ข้อคิด
การประยุกต์ใช้ Edge AI นั้น จำเป็นต้องคำนึงถึงประเด็นด้านความปลอดภัยและความเป็นส่วนตัวของข้อมูลด้วย ข้อมูลที่ถูกประมวลผลโดย Edge AI นั้นอาจถูกเข้าถึงโดยบุคคลหรือหน่วยงานที่ไม่ประสงค์ดีได้ ดังนั้นจึงจำเป็นต้องมีมาตรการรักษาความปลอดภัยที่เหมาะสมเพื่อป้องกันการโจรกรรมข้อมูลนอกจากนี้ การพัฒนา Edge AI นั้น จำเป็นต้องคำนึงถึงผลกระทบต่อสังคมและสิ่งแวดล้อมด้วย เทคโนโลยีนี้อาจนำไปสู่การสูญเสียงานในบางสาขาอาชีพ และอาจก่อให้เกิดปัญหามลพิษทางสิ่งแวดล้อมได้ ดังนั้นจึงจำเป็นต้องมีแนวทางในการจัดการผลกระทบเหล่านี้อย่างเหมาะสม
อย่างไรก็ตาม การพัฒนาและประยุกต์ใช้ Edge AI นั้น จำเป็นต้องคำนึงถึงประเด็นด้านความปลอดภัย ความเป็นส่วนตัว และผลกระทบต่อสังคมและสิ่งแวดล้อมด้วย เช่น
- ความปลอดภัยของข้อมูล ข้อมูลที่ถูกประมวลผลโดย Edge AI นั้นอาจถูกเข้าถึงโดยบุคคลหรือหน่วยงานที่ไม่ประสงค์ดีได้ ดังนั้นจึงจำเป็นต้องมีมาตรการรักษาความปลอดภัยที่เหมาะสมเพื่อป้องกันการโจรกรรมข้อมูล
- ความเป็นส่วนตัว ข้อมูลส่วนบุคคลที่ถูกรวบรวมและประมวลผลโดย Edge AI นั้นจำเป็นต้องได้รับการคุ้มครองตามกฎหมาย
- ผลกระทบต่อสังคมและสิ่งแวดล้อม เทคโนโลยีนี้อาจนำไปสู่การสูญเสียงานในบางสาขาอาชีพ และอาจก่อให้เกิดปัญหามลพิษทางสิ่งแวดล้อมได้ ดังนั้นจึงจำเป็นต้องมีแนวทางในการจัดการผลกระทบเหล่านี้อย่างเหมาะสม
 |
| ROE ปีต่อปีของแต่ละอุตสาหกรรมเมื่อ 26 มิถุนายน 2020 (ที่มา : McKinsey) |
 |
| ขั้นตอนการพัฒนา HealthTech (ที่มา : Meticuly) |
 |
| แต่ละขั้นกว่าจะ IPO ของ HealtTech (ที่มา : Meticuly) |

 |
| ตัวอย่างการวิจัยวัสดุที่ใช้ฝังในร่างกายมนุษย์ (ที่มา : Meticuly) |

 |
| การใช้ 3D Printing เพื่อสร้างแบบจำลองเฉพาะบุคคล (ที่มา : Meticuly) |
 |
| DeepTech ในแต่ละอุตสาหกรรม (ที่มา : Meticuly) |
 |
| อุปกรณ์ทางการแพทย์ (ที่มา : มหาวิทยาลัยมหิดล) |
 | |
การเคลื่อนย้ายอวัยวะ (ตย.หัวใจหมู) เพื่อปลูกถ่าย
|
 | ||
Nano Medicine และ การปลูกถ่ายอวัยวะพิมพ์ด้วยเครื่อง 3d
|
 | ||
Thai FDA ขั้นตอนการจดทะเบียน HealthTech
|
สำหรับการจดทะเบียนเพื่อประเมินประสิทธิภาพ และความปลอดภัยของเครื่องมือการแพทย์นั้น ต้องมีองค์ประกอบคร่าวๆดังนี้
- ลักษณะโดยทั่วไป : อธิบายลักษณะภายนอก หรือ ทางกายภาพของ Software ที่มองเห็น
- จุดประสงค์การใช้ : ระบุวัตถุประสงค์การใช้ และ ความสามารถในการทำงาน
- ข้อบ่งใช้ : อธิบายถึงโรค และ สภาวะที่ Software สามารถวินิจฉัย รักษา ป้องกัน บำบัด หรือ บรรเทา รวมถึงกลุ่มเป้าหมายอย่างชัดเจน
- หลักการทำงาน/กลไกการทำงาน : อธิบายหลักการทำงานให้สอดคล้องกับวัตถุประสงค์การใช้งาน และข้อบ่งใช้ที่แสดง
 |
| การพัฒนาอุปกรณ์ HealthTech |
 |
| การพัฒนาอุปกรณ์ HealthTech |
 |
| ขั้นตอนการกำกับดูแลเครื่องมือแพทย์ (ที่มา : มหาวิทยาลัยมหิดล) |

 |
| ตัวอย่างเครื่องมือ Tele Medecine แบบพกพา (ที่มา : มหาวิทยาลัยมหิดล) |
 |
| อุปกรณ์ HealthTech สำหรับแจ้งเตือนการขับรถ (ที่มา : มหาวิทยาลัยมหิดล) |
 |
| การพัฒนาอุปกรณ์ สั่งงานผ่านคลื่นสมองสำหรับคนพิการ (ที่มา : มหาวิทยาลัยมหิดล) |
 |
| รถเข็นควบคุมผ่าน ระบบ ROS (ที่มา : มหาวิทยาลัยมหิดล) |
 |
| ควบคุมโดรนผ่านคลื่นสมองโดยคนไทย (ที่มา : มหาวิทยาลัยมหิดล) |
 |
| ระบบจัดการสขภาพด้วย Software AI (ที่มา : Stars Micro electronics) |
 |
| ผังการทำงานของระบบ Monitor (ที่มา : Stars Micro electronics) |
 |
| เพื่อตอบสนองความต้องการของคนไข้อย่างครบวงจร (ที่มา : Pinterest) |
 |
| การประยุกต์ใช้ RFID ในระบบ โรงพยาบาล (ที่มา : Stars Micro electronics) |

 |
| พื้นที่ที่เหมาะสมกับการเกษตร : Smart Farm(Thailand) |
 |
| การใช้งาน IoT เพื่อภาคการเกษตร : Smart Farm(Thailand) |






จากตย.ดังรูป การนำ IoT มาเพื่อใช้วิเคราะห์ ความสุกผลองุ่น , การ fementation , การหมักไวน์ ,





















 |
| การเปลี่ยนแปลงข้อมูลผู้ประกันภัยสำหรับ คนทำงาน 1980-2020 (ที่มา:Nation Center for Coverage Innovation @ Families USA) |
- การที่ไม่ได้รับการประกันเพิ่มความเสี่ยงเมื่อเผชิญหน้ากัน
- การประกันสุขภาพป้องกันการเจ็บป่วยนอกเหนือจาก Covid-19
1) รับข้อมูล
insurance <- read.csv("insurance.csv", stringsAsFactors = TRUE)
str(insurance)## 'data.frame': 1338 obs. of 7 variables:
## $ age : int 19 18 28 33 32 31 46 37 37 60 ...
## $ sex : Factor w/ 2 levels "female","male": 1 2 2 2 2 1 1 1 2 1 ...
## $ bmi : num 27.9 33.8 33 22.7 28.9 25.7 33.4 27.7 29.8 25.8 ...
## $ children: int 0 1 3 0 0 0 1 3 2 0 ...
## $ smoker : Factor w/ 2 levels "no","yes": 2 1 1 1 1 1 1 1 1 1 ...
## $ region : Factor w/ 4 levels "northeast","northwest",..: 4 3 3 2 2 3 3 2 1 2 ...
## $ expenses: num 16885 1726 4449 21984 3867 ...ซึ่งในตัวอย่าง ข้อมูลสำหรับลูกค้าประกันภัย ประกอบด้วย อายุ , เพศ , ค่า BMI , จำนวนลูก , สูบบุหรี่ , และ ค่าใช้จ่าย ซึ่ง ข้อมูล 1338 ตัวอย่าง จาก 7 ตัวแปรสำคัญ และ พิจารณา องค์ประกอบต่างๆ เพื่อตั้งเป้าหมายตัวแปรคือ ค่าใช้จ่าย (การเคลมประกัน)
2) เตรียมข้อมูล (Cleansing Data)
เมื่อพิจารณาถึงฐานรายได้ทั้งหมดจากตัวแปรสำคัญ
# สรุปตัวเลขของ ค่าใช้จ่าย
summary(insurance$expenses)## Min. 1st Qu. Median Mean 3rd Qu. Max.
## 1122 4740 9382 13270 16640 63770# แสดงเป็นค่า Histogram การกระจายการใช้จ่ายด้านประกัน
hist(insurance$expenses)

##
## northeast northwest southeast southwest
## 324 325 364 325พิจารณาถึงตัวแปรสำคัญที่เกี่ยวข้องกัน
การจะพิจารณาถึงความสัมพันธ์ของตัวแปลในกราฟด้านบนนั้น เราใช้ ฟังก์ชั่นของ R เพื่อแสดงถึงความสัมพันธ์ดังกล่าว
# แสดงถึงความสัมพันธ์ระหว่าตัวแปรแต่ละตัวด้วย matrix
cor(insurance[c("age", "bmi", "children", "expenses")])## age bmi children expenses
## age 1.0000000 0.10934101 0.04246900 0.29900819
## bmi 0.1093410 1.00000000 0.01264471 0.19857626
## children 0.0424690 0.01264471 1.00000000 0.06799823
## expenses 0.2990082 0.19857626 0.06799823 1.00000000# แสดงภาพความสัมพันธ์ขอตัวแปรทั้ง 4 อัน ในรูปแบบ Matrix
pairs(insurance[c("age", "bmi", "children", "expenses")])
# แสดงข้อมูลที่ได้จากกราฟ
install.packages("psych")
library(psych)
pairs.panels(insurance[c("age", "bmi", "children", "expenses")])
3) การเทรนโมเดล
## ขั้นตอนที่ 3 : การเทรนโมเดลสำหรับข้อมูล
ins_model <- lm(expenses ~ age + children + bmi + sex + smoker + region,
data = insurance)
# หรือใช้คำสั่งนี้แทนโดย . แทนค่าตัวแปรทั้งหมด
# ins_model <- lm(expenses ~ .,data=insurance )
# แสดงให้เห็นค่าประมาณการของ beta coefficients
ins_model##
## Call:
## lm(formula = expenses ~ age + children + bmi + sex + smoker +
## region, data = insurance)
##
## Coefficients:
## (Intercept) age children bmi
## -11941.6 256.8 475.7 339.3
## sexmale smokeryes regionnorthwest regionsoutheast
## -131.4 23847.5 -352.8 -1035.6
## regionsouthwest
## -959.3เบื้องต้นสามารถคาดการณ์ค่าใช้จ่ายโดยใช้สูตรต่อไปนี้ : -$11,941.6 + $256.8(age) - $131.4(sex=male) + $339.3(bmi) + $475.7(children) + $23,847.5(smoker) - $352.8(region=NW) - $1,035.6(region=SE) - $959.3(region=SW)
ดังตัวอย่าง..เริ่มต้นด้วยพื้นฐานเงินเดือน - $ 11,941.6 ค่าใช้จ่ายเพิ่มขึ้น $ 257 สำหรับทุกอายุที่เพิ่มขึ้น $ 339 สำหรับทุกหน่วยที่เพิ่มขึ้นของค่าดัชนีมวลกาย(BMI) และเพิ่มรวมถึง $ 23,848 ถ้าผู้ประกันเป็นผู้สูบบุหรี่ อย่างไรก็ตามหากผู้ประกันตนอาศัยอยู่ในตะวันออกเฉียงใต้ ค่าใช้จ่ายของพวกเขาน่าจะลดลง $ 1,036 โดยตัวแปรอื่น ๆ ทั้งหมดคงที่
อย่างไรก็ตามเรายังไม่ได้ดูว่าตัวแปรใดมีนัยสำคัญ ทั้งนี้เราจะเข้าสูตรเพิ่มเติม4) เพิ่มประสิทธิภาพการประมวลผล
## ขั้นที่ 4 : เพิ่มประสิทธิภาพการประมวลผล
# แสดงให้เห็นรายละเอียดเกี่ยวกับข้อมูลbeta coefficients
summary(ins_model)##
## Call:
## lm(formula = expenses ~ age + children + bmi + sex + smoker +
## region, data = insurance)
##
## Residuals:
## Min 1Q Median 3Q Max
## -11302.7 -2850.9 -979.6 1383.9 29981.7
##
## Coefficients:
## Estimate Std. Error t value Pr(>|t|)
## (Intercept) -11941.6 987.8 -12.089 < 2e-16 ***
## age 256.8 11.9 21.586 < 2e-16 ***
## children 475.7 137.8 3.452 0.000574 ***
## bmi 339.3 28.6 11.864 < 2e-16 ***
## sexmale -131.3 332.9 -0.395 0.693255
## smokeryes 23847.5 413.1 57.723 < 2e-16 ***
## regionnorthwest -352.8 476.3 -0.741 0.458976
## regionsoutheast -1035.6 478.7 -2.163 0.030685 *
## regionsouthwest -959.3 477.9 -2.007 0.044921 *
## ---
## Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
##
## Residual standard error: 6062 on 1329 degrees of freedom
## Multiple R-squared: 0.7509, Adjusted R-squared: 0.7494
## F-statistic: 500.9 on 8 and 1329 DF, p-value: < 2.2e-16Age (p < 0.001)
BMI (p < 0.001)
Children (p < 0.001)
Smoker = yes (p < 0.001)
Region of residence = SE (p = 0.031)
Region of residence = SW (p = 0.045)
5) พัฒนารูปแบบเพิ่มประสิทธิภาพขึ้น
ins_model1.5 <- lm(expenses ~ age + children + bmi + smoker,
data = insurance)
# see the estimated beta coefficients
ins_model1.5##
## Call:
## lm(formula = expenses ~ age + children + bmi + smoker, data = insurance)
##
## Coefficients:
## (Intercept) age children bmi smokeryes
## -12105.5 257.8 473.7 321.9 23810.3summary(ins_model1.5)##
## Call:
## lm(formula = expenses ~ age + children + bmi + smoker, data = insurance)
##
## Residuals:
## Min 1Q Median 3Q Max
## -11895 -2921 -985 1382 29499
##
## Coefficients:
## Estimate Std. Error t value Pr(>|t|)
## (Intercept) -12105.48 941.95 -12.851 < 2e-16 ***
## age 257.83 11.90 21.674 < 2e-16 ***
## children 473.69 137.79 3.438 0.000604 ***
## bmi 321.94 27.38 11.760 < 2e-16 ***
## smokeryes 23810.32 411.21 57.903 < 2e-16 ***
## ---
## Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
##
## Residual standard error: 6068 on 1333 degrees of freedom
## Multiple R-squared: 0.7497, Adjusted R-squared: 0.749
## F-statistic: 998.2 on 4 and 1333 DF, p-value: < 2.2e-16## ขั้นตอนที่ 5 : เพิ่มปรับเปลี่ยนโมเดลให้ทันสมัยมากขึ้น ----
# เพิ่มตัวแปรจาก "age" โดยพิจารณาไม่ได้เป็นเชิงเส้น
insurance$age2 <- insurance$age^2
# เพิ่มตัวแปรสำหรับ BMI >= 30
insurance$bmi30 <- ifelse(insurance$bmi >= 30, 1, 0)
# สร้างแบบจำลอง
ins_model2 <- lm(expenses ~ age + age2 + children + bmi + sex +
bmi30*smoker + region, data = insurance)
summary(ins_model2)##
## Call:
## lm(formula = expenses ~ age + age2 + children + bmi + sex + bmi30 *
## smoker + region, data = insurance)
##
## Residuals:
## Min 1Q Median 3Q Max
## -17297.1 -1656.0 -1262.7 -727.8 24161.6
##
## Coefficients:
## Estimate Std. Error t value Pr(>|t|)
## (Intercept) 139.0053 1363.1359 0.102 0.918792
## age -32.6181 59.8250 -0.545 0.585690
## age2 3.7307 0.7463 4.999 6.54e-07 ***
## children 678.6017 105.8855 6.409 2.03e-10 ***
## bmi 119.7715 34.2796 3.494 0.000492 ***
## sexmale -496.7690 244.3713 -2.033 0.042267 *
## bmi30 -997.9355 422.9607 -2.359 0.018449 *
## smokeryes 13404.5952 439.9591 30.468 < 2e-16 ***
## regionnorthwest -279.1661 349.2826 -0.799 0.424285
## regionsoutheast -828.0345 351.6484 -2.355 0.018682 *
## regionsouthwest -1222.1619 350.5314 -3.487 0.000505 ***
## bmi30:smokeryes 19810.1534 604.6769 32.762 < 2e-16 ***
## ---
## Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
##
## Residual standard error: 4445 on 1326 degrees of freedom
## Multiple R-squared: 0.8664, Adjusted R-squared: 0.8653
## F-statistic: 781.7 on 11 and 1326 DF, p-value: < 2.2e-16# สร้างโมเดลอันสุดท้าย
ins_model2.5 <- lm(expenses ~ age + age2 + children +
bmi30*smoker, data = insurance)
summary(ins_model2.5)##
## Call:
## lm(formula = expenses ~ age + age2 + children + bmi30 * smoker,
## data = insurance)
##
## Residuals:
## Min 1Q Median 3Q Max
## -18718.8 -1641.7 -1313.8 -846.4 23799.7
##
## Coefficients:
## Estimate Std. Error t value Pr(>|t|)
## (Intercept) 2237.3824 1083.9103 2.064 0.0392 *
## age -24.5114 60.2871 -0.407 0.6844
## age2 3.6643 0.7524 4.870 1.25e-06 ***
## children 669.3870 106.6878 6.274 4.74e-10 ***
## bmi30 42.3929 276.9065 0.153 0.8783
## smokeryes 13389.6763 442.5871 30.253 < 2e-16 ***
## bmi30:smokeryes 19759.1124 608.6309 32.465 < 2e-16 ***
## ---
## Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
##
## Residual standard error: 4483 on 1331 degrees of freedom
## Multiple R-squared: 0.8636, Adjusted R-squared: 0.8629
## F-statistic: 1404 on 6 and 1331 DF, p-value: < 2.2e-16สรุปโดยรวม:
| Model | RSE (DF) | R-sq | Adj R-sq | F-stat (DF) |
|---|---|---|---|---|
| 1 | 6062 (1329) | .7509 | .7494 | 501 ( 8/1329) |
| 2 | 6068 (1333) | .7497 | .749 | 998 ( 4/1333) |
| 3 | 4445 (1326) | .8664 | .8653 | 782 (11/1326) |
| 4 | 4483 (1331) | .8636 | .8629 | 1404 (6/1331) |

 |
| ตัวอย่าง platform ประกันภัย (ที่มา : Swiss Re) |
 |
| องค์ประกอบลักษณะการซื้อประกัน (ที่มา : Swiss Re) |
อะไรคือ AI
 |
| ที่มา : @csenn |
 |
| AIBO (Pet Robotic) ที่มา : Sony |
 |
| Deep Blue ที่มา : IBM |
อะไรคือพื้นฐานของระบบอัจฉริยะ (Intelligence)

- เป็นการผสมผสานระหว่างขั้นตอนวิธีการ (Algorithms) โดยทั่วไป (General-purpose) และ เฉพาะเจาะจง (Special-purpose) ซึ่งแจกแจงได้ดังนี้
- ตัวอย่างของขั้นตอนวิธีการแบบโดยทั่วไป
- การเรียนรู้สิ่งใหม่ๆ
- การเก็บความจำ และ ปรับปรุงข้อมูลเดิม
- การเรียกใช้ข้อมูลจากหน่วยความจำ
- ตัวอย่างของขั้นตอนวิธีการแบบเฉพาะเจาะจง
- การจดจำรูปแบบภาพเฉพาะ
- การจดจำเสียง
- การเรียนรู้และพูดภาษา
และถามต่ออีกว่า ... อะไรคือ Artificial Intelligence
- การผสมผสานระหว่างขั้นตอนวิธีการ General-purpose และ Special-purpose
- ตัวอย่าง General-purpose
- การเรียนรู้ขั้นตอนวิธีการ
- การพิสูจน์ทฤษฎี
- ตัวอย่างสำหรับ Special-purpose
- การจดจำรูปแบบ
- การจำโครงสร้างของภาษา
ตัวอย่างการใช้งานของ AI
- ในวงการแพทย์ (Healthcare) ใช้ในงานจำแนกพิจารณาถึงมะเร็งเต้านม , การวิเคราะห์โรคร้ายอย่าง COVID19 ด้วย Super Computer
- ในวงการสัตว์ เช่นโครงงานช่วยผึ้ง
- เครื่องมือสำหรับคนพิการ โครงการช่วยเด็กพิการหูหนวกในการเรียนรู้ หรือ การวิเคราะห์อารมณ์สำหรับคนตาบอด
- สภาพภูมิอากาศ วิเคราะห์สภาพอากาศ เพื่อตามการใช้ Carbon Footprint
- การอนุรักษ์สัตว์โลก
- โครงการช่วยน้องหิว
- ลดการเหลื่อมล้ำการไม่เท่าเทียมกัน หรือ ใช้ตรวจดูการใช้ชีวิตในเมือง smart city การใช้ภาพถ่ายดาวเทียมวิเคราะห์ในการเฝ้าระวังความปลอดภัย
- ตรวจหาข่าวปลอม ในโลกโซเชียล
- ใช้ตรวจสอบเม็ดยา ให้ทราบวิธีการใช้งาน และ ที่มาของยา
- การใช้ตรวจจับการเสื่อมโทรมของเขื่อนจากกระแสน้ำ
สองมุมมองของ AI
- AI อาจจะกล่าวได้ถึงการจำลองมันสมองของมนุษย์ เช่น
- Cognitive science (ประชานศาสตร์ : การศึกษาทางวิทยาศาสตร์ทั้งเรื่องของความคิดและความฉลาด)
- Turing test (การทดสอบของทัวริง : การทดสอบความสามารถของปัญญาประดิษฐ์ว่าทำได้ดีใกล้เคียงมนุษย์แล้วหรือยัง)
- AI อาจจะเสมือนสิ่งที่สมองของมนุษย์ ควรจะทำ เช่น
- Rationality ความมีเหตุผล การพินิจพิเคราะห์ ความชอบธรรม

 |
| ที่มา : Advance AI https://j.mp/2YGXK6n |
การพิเคราะห์เชิงเหตุผล (Acting Rationally)
- Rational behavior = ทำสิ่งที่ถูกต้องเป็นเหตุเป็นผลกัน
- The right thing = การคาดหวังที่จะเพิ่มให้ถึงเป้าหมาย จากสิ่งที่กำหนดให้
- เช่นปรัชญาของ อริสโตเติ้ล "Every art and every inquiry, and similarly every action and pursuit, is thought to aim at some good" ซึ่งคนที่จะดี เพราะเขาชักนำไปในทางนึงทางใด
- หมายเหตุ. การทำสิ่งที่ถูกต้อง อาจจะไม่ได้เข้าสู่กระบวนการทางความคิด
- เช่น การกระพริบ และ การตอบสนองมากจาก Rational , ด้วยข้อกำหนดนี้การคิดที่เกิดขึ้นเพื่อสนองสำหรับบางสิ่ง => เป็นลักษณะ AI ที่เราพิจารณา
ส่วนประกอบของ ระบบ AI
 |
| ที่มา : CMU |
 |
| ที่มา : ROS (Robot Operating System) |
Rational Agents
- คือ Agent ที่ได้รับข้อมูล (perceives) และ มีการกระทำ (action) ตามรูปด้านบน
- Agents สามารถสร้างในรูปแบบเป็นฟังก์ชั่นจากความสัมพันธ์เป็นการกระทำ
สำหรับตัวอย่างที่กำหนดในสภาพแวดล้อม และ งานที่ทำ ซึ่งเราจะหาเอเจ้นท์ จากผลสำเร็จดีที่สุด - Rational agent ที่เข้าตามฟังก์ชั่นที่กำหนด จะมีเงื่อนไขสูงสุด โดยพิจารณาจาก เป้าหมายสำเร็จ และ การใช้ทรัพยากรคุ้มค่าที่สุด โดยผ่านกระบวนการคิด เช่น การหาการเคลื่อนไหวที่ดีที่สุด, เส้นทางที่เร็วที่สุด, การจดจำ, การจำแนกวัตถุ, การจดจำภาษา, การขับเคลื่อนด้วยตัวเอง ทั้งนี้เป็นผลมาจากกลไกทางความคิดของมนุษย์
- ข้อแม้ : การคำนวนที่มีข้อจำกัดจะทำให้การคิดแบบ Rationality ไม่พึงสำเร็จได้
- ดังนั้นเป้าหมายเราจึงเป็นการหาฟังก์ชั่นที่ดีที่สุดตามเงื่อนไขข้อจำกัดของการคำนวนทรัพยากร ตามกระแสความสนใจในแต่ละช่วงเวลา (หน่วยความจำ, เวลา)

AI ในยุคแรก
- ENIAC : ซูเปอร์คอมพิวเตอร์ ที่สร้างขึ้นในปี 1946

- เริ่มใช้มากขึ้นในปี 1950 เกี่ยวกับ Artificial Intelligence
- Rosenblatt's perceptron
- Samuel's checkers player


AI ในปัจจุบัน ที่มนุษย์ต้องการ
- สร้างโปรแกรมที่มีความรู้สึกนึกคิดอย่างมนุษย์ : สามารถพิสูจน์ ทฤษฎี , เล่นหมากรุก , มีการพูดคุย
- เรียนรู้จากประสพการ์ณ และตอบสนองสิ่งที่สำคัญ
- การมีตรรกะ เหตุผลเป็นกุญแจสำคัญ
- การวิจัยที่มีเป้าหมายในการพัฒนาหรือสรรค์สร้างเพื่อแก้ไขปัญหา
- การพัฒนาภาษาธรรมชาติ (Natural Language) เพื่อให้เข้าใจง่ายและ ทำได้
AI ทดสอบการคิดและวิเคราะห์
| Quick! Draw! | https://quickdraw.withgoogle.com/ |
| AttnGAIN – Image Generation Machine | https://experiments.runwayml.com/generative_engine/ |
| Talk to Books | https://books.google.com/talktobooks/ |
AI ในอนาคต : การใช้คณิตศาสตร์ช่วยการคำนวน
- การคำนวนหาทฤษฏีความน่าจะเป็นที่ต้องใช้การคำนวนมากๆระดับ Quantum Computing , การตัดสินพิจารณาทฤษฎีสมมุติฐาน , ค่าสถิติชั้นสูง
- มุ่งหวังการแก้ไขปัญหาที่เฉพาะเจาะจง มากกว่าการสร้าง เหตุ
- AI ในปัจจุบันแฝงในแต่ละสาขา :
- การเข้าใจ (Perception) โดยเฉพาะ Vision เป็นสาขาที่มีคนเรียนรู้มาก
- หุ่นยนต์ (Robotics) เป็นแขนงที่ใหญ่และเรียนรู้กันเยอะ
- การพิจารณาเหตุผล (Deliberative Reasoning) ซึ่งเรียกกันว่า "AI"
- และอีกหลายๆสาขา พิจารณาการวิวัฒน์ ด้วยสไตล์ และคำศัพท์เฉพาะ
- และอีกหลายๆโครงการเช่น Dynamic Robotics ที่ทำหุ่นยนต์ลักษณะเฉพาะ "AI Robot"
สำหรับ Edge Computing เทคโนโลยี เข้ามาอยู่ในกระแสมากขึ้น ไม่ว่าจะเป็นค่าย IBM , Intel และอื่นๆ โดยที่หลายบริษัทได้พิจารณาว่า Edge Computing เป็นองค์ประกอบสำคัญขอบ Iot ที่จะช่วยเติมเต็มการทำงานของ ระบบ Cloud
 |
| ที่มา : faredge.eu |
การจะเปลี่ยนจาก Conventional Centralized Control มาเป็น IoT Cloud Base และ Edge Computing คงต้องเน้นการทำงานในแต่ละส่วน โดยที่ Edge Computing สามารถแทรกเข้าไปทำงานในทุกส่วน ไม่ว่าจะเป็น Server , Gateway และ Device
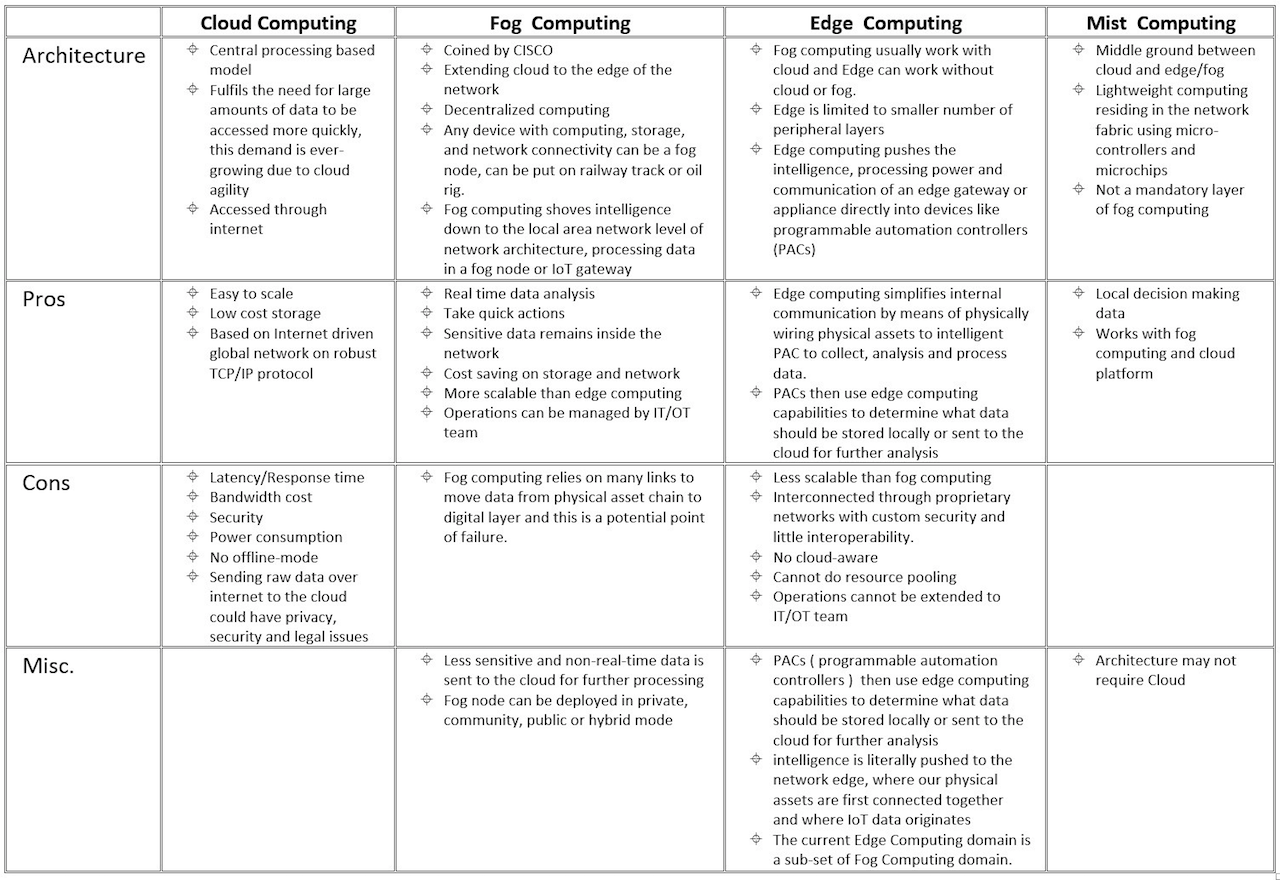
แนวคิด Edge Computing นั้นพัฒนามาก่อน IoT โดยเริ่มต้นจากระบบ LAN ที่เป็นการเดินสายอุปกรณ์เครือข่ายแบบ Star Topology และ พัฒนามาเป็น VLAN ตามการใช้งานของบุคคล หรือ CDN (Content Delivery Network) ที่ใช้การเข้าถึงข้อมูลจากตำแหน่งเรียกหาที่ใกล้ที่สุด ดังนั้น การประมวลผลแบบ Edge มีความหมายที่กว้าง และ สามารถนำไปใช้ได้ในหลากหลายรูปแบบ ซึ่งในระบบ Fog Computing หรือ Fogging เป็นระบบ Network เครือข่ายที่พัฒนามาสำหรับ IoT พัฒนาโดย Cisco โดยมี OpenFog Consortium เป็นส่วนในการสร้าง Fog Computing ให้เป็นมาตรฐานให้กับทางภาคธุรกิจ เพื่อสร้างเครือข่าย Edge Computing ซึ่ง Fog จะกำหนดรายละเอียดทางเทคนิคต่างๆที่เกี่ยวข้อง ไม่ว่าจะเป็น รูปแบบเครือข่าย , การจัดเก็บข้อมูล , ความปลอดภัย , การประมวลผลแบบ Realtime โดยจากแอพในส่วน Cloud Computing เปรียบเสมือน Edge เป็นแนวคิด ส่วน Fog Computing Layer เป็นกระบวนการ ที่ครอบ และ คั่นกลางระหว่าง Cloud Computing และ Edge Computing ตามรูป
 |
| ที่มา @mikequindazzi |
ซึ่งในรายละเอียดนั้น Edge Computing จะครอบคลุมเฉพาะส่วนที่เกิดขึ้นใน device หรือ แหล่งกำเนิดข้อมูลนั้นเอง โดยใช้พวก Embed Device บางทีอาจจะหมายถึงโหนดที่ห่างจากแหล่งกำเนิดไม่เกิด 1 hop ส่วน Fog Computing จะประมวลผลในระดับ LAN เช่น Gateway, Router , Access Point
บางนิยามอาจจะให้ความเห็นว่า Edge หมายถึงการคำนวณที่เกิดขึ้นในโหนดหนึ่งๆ ที่ภายใต้ Cloud Computing และ ใกล้แหล่งกำเนิดข้อมูล และ Fog Computing นั้นเป็นการประมวลผล Edge หลายๆ อันทำเป็นระบบ Cluster ระหว่างอุปกรณ์ประมวลผล โดยประมวลผลที่ใกล้กับอุปกรณ์ปลายทางหรือแหล่งข้อมูล
 |
| ที่มา : thecustomizewindows |
Cloud Computing กับ Edge Computing อย่างไหนดีกว่ากัน
1) Delay/Response Time
 |
| ที่มา : hazelcast / Application Intelligence / Sense Think Act |
2) Resource/Computational power
3) Cost/Expense
 |
| ที่มา : Computes |
4) Geographical dispersion of device
 |
| ที่มา : Electrical & Computing Engineering CMU |
5) Internet Connectivity
 |
| ที่มา : FarmD |
6) Data Privacy/Security
 |
| ที่มา : Cygnet Infotech |
Edge ในภาคอุตสาหกรรม
การพัฒนาระบบ IoT ในภาคอุตสาหกรรม 4.0 ที่มีระบบการขับเคลื่อนแบบ Cyber-Physical ในเชิงกายภาพ จากระบบควบคุมหนึ่งไปสู่ระบบโรงงาน ซึ่งมีการพัฒนาในส่วนของอุปกรณ์ Device หรือ Edge ให้มีความเสถียร (Realiability) มาตรฐานการสื่อสารที่ใช้กันอยู่จึงมักเป็น แบบมีสาย เช่น ตระกูล Fieldbus, Modbus หรือ Ethernet อันดับถัดมา อุปกรณ์เครื่องจักรในโรงงานมักจะมาจากผู้ผลิต ที่หลากหลาย มีโพรโตคอลสื่อสารแตกต่างกัน หรือแม้กระทั่งเครื่องจักรเก่าๆ ที่ไม่สามารถสื่อสารใดๆ ได้เลย ทำอย่างไรจึงจะสามารถดึงข้อมูลจากอุปกรณ์เครื่องจักรเหล่านี้ออกมาประมวลผล แม้จะมีระบบที่ควบคุมการเชื่อมต่อทั้งหมด เช่น ROS ที่ใช้ควบคุม Mobile Robot หรือ HMI ที่ควบคุม PLC หลายตัว จากสองประเด็นนี้ Edge จะ สามารถก้าวเข้ามามีบทบาทที่สำคัญยิ่ง โดยในเบื้องต้นอุปกรณ์Edge ควรมีฟังก์ชันที่สามารถแปลงรูปแบบ ข้อมูลที่แตกต่างจากอุปกรณ์เครื่องจักรที่หลากหลายทั้งเก่าและใหม่ให้อยู่ในรูปแบบกลางเพื่อให้บูรณาการเข้า ด้วยกันได้และจากนั้นจะประมวลผลเลยหรือส่งขึ้นไปยัง Cloud ก็ตามแต่ความเหมาะสม ประการที่สาม การสังเคราะห์โมเดลจากข้อมูลที่เก็บมาได้เพื่อนำไปใช้ตัดสินในภาคอุตสาหกรรม จะต้องอาศัยองค์ความรู้จากทั้งฝั่ง OT และ IT มาผนวกกัน การซื้อระบบสำเร็จรูปหรือว่าจ้างผู้เชี่ยวชาญมา พัฒนาอาจให้ผลลัพธ์ที่เร็วแต่ไม่ยั่งยืน เปรียบเสมือนการเพาะชำ เพราะสภาวะในโรงงานหรือธุรกิจที่ เปลี่ยนแปลงได้ตลอดเวลาเช่น ความต้องการของตลาด สภาวะของอุปกรณ์ตามอายุการใช้งาน เครื่องจักร ใหม่ๆ ที่เพิ่มเข้ามาในระบบ หรือการปรับขั้นตอนการผลิต ทั้งหมดล้วนส่งผลให้โมเดลที่ใช้อยู่ใช้ไม่ได้อีกต่อไป ดังนั้นหากบุคลากรของโรงงานเองไม่มีส่วนร่วมกับการพัฒนาระบบตั้งแต่ต้น ก็เป็นการยากที่โรงงานจะ สามารถบำรุงรักษาและปรับแก้ระบบได้เองอย่างเหมาะสม ค าถามที่ตามมาคือ ใครควรรับผิดชอบหน้าที่นี้? IT หรือ OT? นำไปสู่บางเสียงที่ไม่เห็นด้วยกับการใช้ Edge ในอุตสาหกรรม และเสนอให้ใช้ Private Cloud แทน เพื่อให้ความรับผิดชอบนี้ตกอยู่กับฝ่าย IT อย่างชัดเจน เมื่อเรามองวัฒนธรรมในโรงงานส่วนใหญ่ จริงอยู่ที่ OT และ IT ทำงานเป็นเอกเทศจากกันมาก และการรวมกันไม่ใช่เรื่องง่ายด้วยพื้นฐาน องค์ความรู้ และโฟกัสที่ ต่างกัน แต่เราต้องไม่ลืมว่าการก้าวไปสู่อุตสาหกรรม 4.0 การบูรณาการ OT และ IT เข้าด้วยกันเป็นสิ่งที่ หลีกเลี่ยงไม่ได้ซึ่งไม่ใช่จะบูรณาการเพียงแค่ระบบ แต่ต้องรวมไปถึงคน ดังนั้นโรงงานต้องวางแนวทางปรับตัว หากต้องการพัฒนาไปสู่การเป็นโรงงานที่อัจฉริยะหรือฉลาดขึ้น โดยอาจเริ่มต้นจากตั้งโปรเจ็คพัฒนา Edge เพื่อ ติดตามหรือควบคุมกระบวนการใดกระบวนการหนึ่ง และผนึกกำลังคนจากทั้งสองฝั่งให้เข้ามามีส่วนร่วม โดย OT มีบทบาทในการถ่ายทอดองค์ความรู้เฉพาะด้าน หาวิธีการดึงข้อมูลที่เกี่ยวข้องจากเครื่องจักร และนำ ผลลัพธ์ไปปรับปรุงกระบวนการ ขณะที่ฝ่าย IT รับผิดชอบในการสร้างโมเดล พัฒนาโปรแกรม ออกแบบ ตำแหน่งที่ตั้งภายในเครือข่ายของโรงงาน และดูแลเครือข่ายและหน่วยเก็บข้อมูล และ เข้าสู่กระบวนการสลาย Silo เพื่อพัฒนาสู่ Digital Factory หรือ Industry 4.0 ที่ซึ่งสามารถบริหารโรงงานแบบ Real-Time และกำหนด Esset แต่ละแห่งให้ทำงานแบบ Mobility พร้อมกันได้ผ่านระบบ Digital Twin (ระบบควบคุมจากโลกเสมือนไปยังฝ่ายระบบปฏิบัติงาน) |
| ที่มา : https://j.mp/3i6zS3Q |
 |
| ที่มา : https://j.mp/2VnrumK |
"ควรเริ่มต้นอย่างไร และ กระบวนการใด?"
 |
| ที่มา : Industrial Internet Consortium |
 |
| EDGE COMPUTING MARKET - GROWTH, TRENDS, FORECASTS ที่มา : https://j.mp/3i5IGa4 |
ตัวอย่างแนวทางการพัฒนาระบบ IoT Edge-Cloud ในภาคอุตสาหกรรม
 |
| ที่มา : Machine Monitoring & Control (KX knowledge) |
2) Fault Detection and Notification
 |
| ที่มา : Software Development (KX Knowledge) |
 |
| ที่มา : Fault Detection (KX Knowledge) |
 |
| ที่มา : smart maintenance (http:gg.gg/fds5h) |
 |
| ที่มา : Research Gate |
 |
| การพัฒนาระบบ IIoT แบบขั้นบันได้ (ที่มา : Nectec) |
 |
| Smart Factory การขับเคลื่อน สู่ภาคธุรกิจ (ที่มา : @mikequndazz) |
 |
| Industry 4.0 กับการขับเคลื่อนด้วยเทคโนโลยี (ที่มา : @Ranald_vanLoon) |
 |
| Digital Transformation pyramid (ที่มา : @Ranald_vanLoon) |
สัมนาของทาง KX : https://www.facebook.com/kxinnovation
ตัวอย่างระบบรถที่ใช้การชาจแบบ Wireless ซึ่งต้องพิจารณาจากการออกแบบ และ ระยะห่างจากจุดชาร์จ
การผสมผสานระบบงาน AGV เข้ากับระบบการตรวจสอบการกระจายสินค้า โดยมีการแสดงวิธีการจำแนกสินค้าด้านบน

การประยุกต์ใช้ AGV Follow Object ในโรงงาน ซึ่งราคาต่อค่าแรงเขายังคุ้มค่าที่จะใช้งานอยู่ โดยระบบมีดีไซน์ให้วางล้อให้กรณีแบตหมดเพื่อในการเปลี่ยน และ เข็นได้ง่ายขึ้น
ทั้งนี้ในอนาคตอันใกล้เราคงได้เห็นระบบ AGV ที่บูรณาการและสั่งงานได้ทั้งแนวระนาบ และ แนวดิ่ง และมีระบบหยิบจับเองอัตโนมัติได้อันใกล้ และ สั่งพิมพ์แบบ 3D ได้ ทั้งนี้ต้องพิจารณาเรื่อง จุดคุ้มทุน โดยพิจารณาจากราคาสินค้า และ ค่าแรง


ขอแนะนำขั้นตอนการเชื่อมต่อเพื่อสั่งงานระบบ Drone ของ DJI รุ่น Tello Edu ซึ่งผลิตโดย Ryze Robotics มีขีดความสามารถในการสั่งงาน และ เชื่อมต่อมากกว่า 1 ตัว จาก PC เราได้
ซึ่งเราสามารถ Emulate Drone รุ่นอื่นๆ และ ลอง ชุดคำสั่ง script สั่ง โดรนผ่านระบบ Simulation ด้วย Rosbot ในบทความครั้งก่อน ดังนี้
ด้วยการที่โดรนDJI Tello รุ่นนี้ เปิดความสามารถให้นักพัฒนาเข้าไปเขียนชุดคำสั่งต่างๆ ผ่านระบบเน็ตเวิร์คเครื่อข่าย Wifi สำหรับ SDK สามารถอ่านรายละเอียด ได้จาก
(https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf)
นอกเหนือจากนั้น DJI เปิดให้นักพัฒนาเขียนระบบเพื่อควบคุมโดรนที่มีศักยภาพสูง และมีความซับซ้อนมากขึ้นซึ่งศึกษาได้จาก https://developer.dji.com/
การเรียนโดรนตัวนี้ เพียงเพื่อการศึกษา การทำงานแบบ drone sync (swarm)
โดยเตรียมอุปกรณ์ และ ระบบที่ใช้งานมีดังนี้
1) Drone Tello รุ่น EDU ราคาประมาณ 4,000 - 4,900 บาท
2) Software Packet Sender https://packetsender.com/download
3) ระบบปฏิบัติการ Ubuntu 18.04 LTS เพื่อเขียน python script สำหรับควบคุมสั่งงาน Drone https://releases.ubuntu.com/18.04/ โดยสามารถสร้างผ่าน ระบบ WSL2 บน windows 10 ขึ้นไปอ่านเพิ่มเติมได้จาก ติดตั้ง Linux 18.04
ในส่วนประกอบของโดรนมีส่วนต่างๆ ที่สำคัญได้แก่
Rotors, Motors , Camera , Accelerometer , Connectivity และมีส่วนของใบพัดทั้งหมดเป็นคู่ 4 แกน หรือ 6-8 แกน โดยความสามารถของโดรนสามารถเคลื่อนที่ได้ ด้วยการ Yaw , Pitch, Roll สำหรับการหมุนทั้ง 3 ระนาบดังรูป
ในส่วนของ Telloสามารถเขียน ชุดคำสั่งด้วย GUI เราเอง เพื่อสั่งงานให้ โดรนเคลื่อนที่ ไปยังทิศทางต่างๆได้ และ ยังทั้งสามารถเขียน code python ให้ติดตามใบหน้าของคนที่ตรวจจับได้ด้วย OpenCV และ เชื่อมต่อด้วย video stream 720p ซึ่งสามารถประมวลผลด้วย embed system อย่าง Raspberry Pi โดยติดตั้งบนตัวโดรนเอง

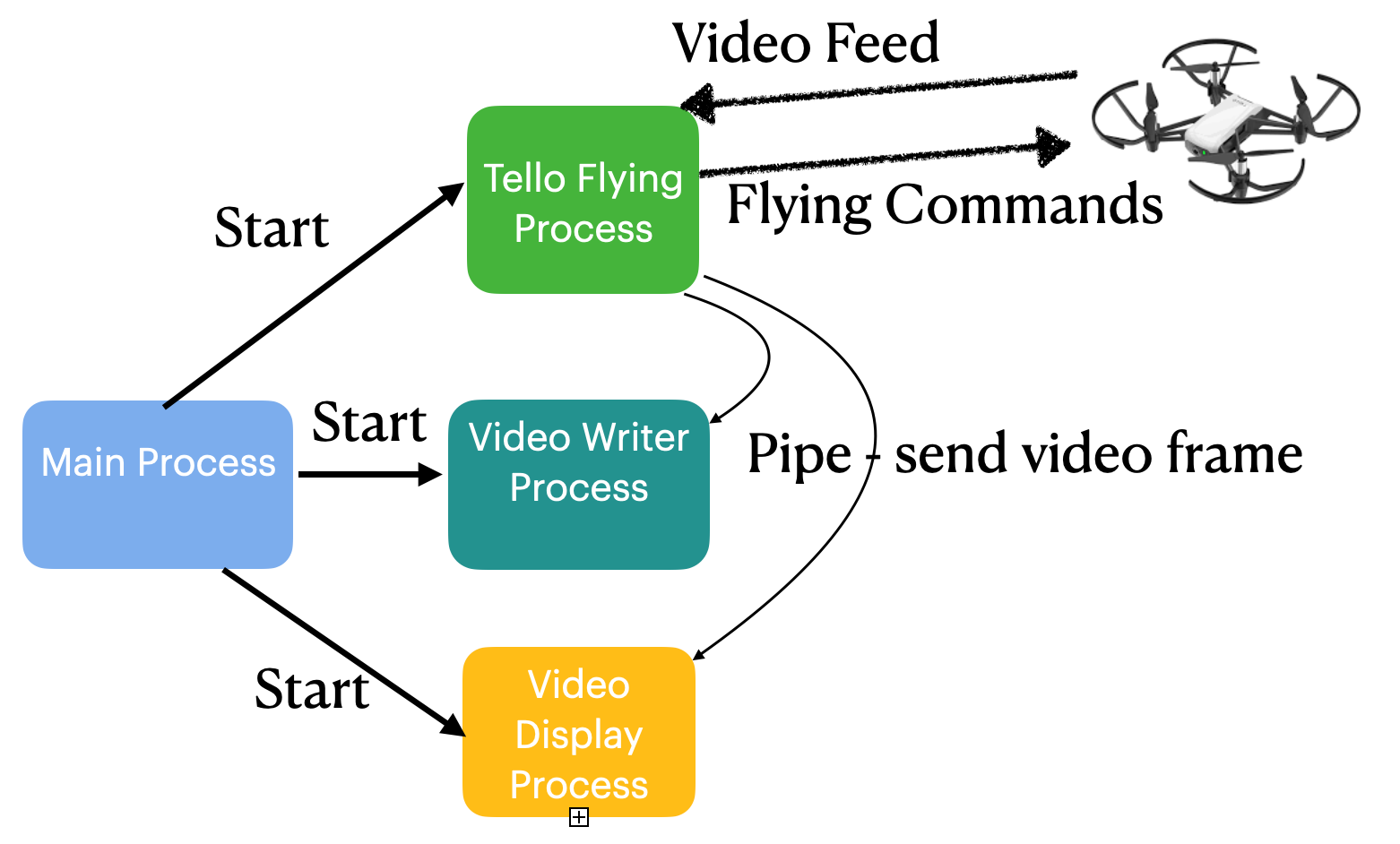
ในส่วนของ API ที่ใช้เชื่อมต่อ กับ Tello นั้นรับคำสั่งจาก UDP โปรโตคอล สำหรับส่งชุดคำสั่งไปยังโดรน ซึ่งทดสอบโดรนด้วยคำสั่งง่ายๆจาก packet sender

โดยกำหนด IP และ TCPIP port เป็น 192.168.10.1 port 8889 ตั้งค่าที่ เมนู File Setting UDP server 8889
สำหรับชุดคำสั่ง ของโดรน เริ่มต้นด้วย command และ เมื่อโดรนรับคำสั่งแล้วจะส่ง packet UDP ตอบกลับมา (Receive Tello State) ซึ่งบางคำสั่งจะต้องใช้เวลาในการทำงานให้เสร็จ เช่น คำสั่ง take off , land โดยจะส่งมาจาก IP 0.0.0.0 ที่ UDP port 8890
สำหรับการรับ Video จาก Tello จะส่งมาจาก UDP server : 0.0.0.0 Port : 11111 และถ้าจะเปิดรับ Video Stream ด้วยการสร้าง UDP server รับ message จาก IP 0.0.0.0 และสั่งให้ส่งภาพวิดีโอ ด้วย "streamon" ไปยัง Tello (IP 192.168.10.1) ที่ พอร์ต 8889
สำหรับค่าที่ ได้รับ จาก Tello จะมีค่า "ok" และ "error"
โดยสามารถเขียน ชุดคำสั่งด้วย python เพื่อสร้าง controller ด้วย GUI บน python ดังนี้

การเตรียมความพร้อมสำหรับ Ubuntu
- ติดตั้ง package ต่างๆ ในส่วน pythonsudo apt-get update -y
sudo apt-get install python2.7 python-pip -y
sudo pip install --upgrade pip
sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 150
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 100
sudo apt-get update -y
sudo pip install cmake
- ติดตั้ง Library
sudo apt-get install libboost-all-dev -y
sudo apt-get install libavcodec-dev -y
sudo apt-get install libswscale-dev -y
sudo apt-get install python-numpy -y
sudo apt-get install python-matplotlib -y
sudo pip install opencv-python
sudo apt-get install python-imaging-tk
- ติดตั้ง h264decoder
mkdir h264decoder
sudo git clone https://github.com/DaWelter/h264decoder.git
cd h264decoder
mkdir build
cd build
sudo cmake
sudo make
ทดสอบโปรแกรมง่ายๆเพื่อส่งคำสั่งให้โดรน Take off , Landing
# Import the built-in socket package
import socket
import time
# IP and port of sending computer
# In this case we're sending a UDP packet to PacketSender for
demonstration purposes
# Be sure to change this to the IP address of the computer running this Python script
simulated_tello_address = ('10.100.8.229', 8889)
# Create a UDP connection that we'll send the command to sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# Command variable that we'll send
# This "command" value is what lets Tello know that we want to enter command mode
message = "command"
# Local port for binding port from tello
sock.bind(('', 9000))
# Function to send messages to Tello
def send(message):
try:
sock.sendto(message.encode(), tello_address)
print("Sending message: " + message)
except Exception as e:
print("Error sending: " + str(e))
# Function that listens for messages from Tello and prints them to the screen
def receive():
try:
response, ip_address = sock.recvfrom(128)
print("Received message: " + response.decode(encoding='utf-8') + "
from Tello with IP: " + str(ip_address))
except Exception as e:
print("Error receiving: " + str(e))
# Send Tello into command mode
send("command")
# Receive response from Tello
receive()
# Delay 3 seconds before we send the next command
time.sleep(3)
send("takeoff")
receive()
# Delay 5 seconds before we send the next command
time.sleep(5)
send("land")
receive()
# Delay 5 seconds before we send the next command
time.sleep(5)
# Print message to screen
print("Message sent!")
# Close the UDP socket
sock.close()
การควบคุมโดรนกรณีมากกว่า 2 ตัวขึ้นไป (Swarm)โดยควบคุมผ่าน Router โดยส่งคำสั่งให้โดรนเปลี่ยนการเชื่อมต่อไปยัง Router โดยต้องทราบ SSID และ รหัสผ่าน

และใช้ชุดคำสั่งจาก python script เพื่อสั่งโดรนให้บินพร้อมๆกัน ยกตย. คำสั่งดังนี้
# Import modules
import subprocess
import ipaddress
from subprocess import Popen, PIPE
# Create the network
# The IP below is associated with the TP-Link wireless router
ip_net = ipaddress.ip_network(u'192.168.0.1/24', strict=False)
# Loop through the connected hosts
for ip in ip_net.hosts():
# Convert the ip to a string so it can be used in the ping method
ip = str(ip)
# Let's ping the IP to see if it's online
toping = Popen(['ping', '-c', '1', '-W', '50', ip], stdout=PIPE)
output = toping.communicate()[0]
hostalive = toping.returncode
# Print whether or not device is online
if hostalive ==0:
print(ip, "is online")
else:
print(ip, "is offline")
--------------------------------------------------------------------------
And here is your example Python code for Tello Drone Swarm, “Swarmpattern.py”
--------------------------------------------------------------------------
# Import the necessary modules
import socket
import threading
import time
# IP and port of Tello
tello1_address = ('192.168.0.100', 8889)
tello2_address = ('192.168.0.101', 8889)
# IP and port of local computer
local1_address = ('', 9010)
local2_address = ('', 9011)
# Create a UDP connection that we'll send the command to
sock1 = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
sock2 = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# Bind to the local address and port
sock1.bind(local1_address)
sock2.bind(local2_address)
# Send the message to Tello and allow for a delay in seconds
def send(message, delay):
# Try to send the message otherwise print the exception
try:
sock1.sendto(message.encode(), tello1_address)
sock2.sendto(message.encode(), tello2_address)
print("Sending message: " + message)
except Exception as e:
print("Error sending: " + str(e))
# Delay for a user-defined period of time
time.sleep(delay)
# Receive the message from Tello
def receive():
# Continuously loop and listen for incoming messages
while True:
# Try to receive the message otherwise print the exception
try:
response1, ip_address = sock1.recvfrom(128)
response2, ip_address = sock2.recvfrom(128)
print("Received message: from Tello EDU #1: " + response1.decode(encoding='utf-8'))
print("Received message: from Tello EDU #2: " + response2.decode(encoding='utf-8'))
except Exception as e:
# If there's an error close the socket and break out of the loop
sock1.close()
sock2.close()
print("Error receiving: " + str(e))
break
# Create and start a listening thread that runs in the background
# This utilizes our receive functions and will continuously monitor for incoming messages
receiveThread = threading.Thread(target=receive)
receiveThread.daemon = True
receiveThread.start()
# Each leg of the box will be 100 cm. Tello uses cm units by default.
box_leg_distance = 100
# Yaw 90 degrees
yaw_angle = 90
# Yaw clockwise (right)
yaw_direction = "cw"
# Put Tello into command mode
send("command", 3)
# Send the takeoff command
send("takeoff", 8)
# Loop and create each leg of the box
for i in range(4):
# Fly forward
send("forward " + str(box_leg_distance), 4)
# Yaw right
send("cw " + str(yaw_angle), 3)
# Land
send("land", 5)
# Print message
print("Mission completed successfully!")
# Close the socket
sock1.close()
sock2.close()
ทั้งนี้ต้องทดสอบในภาคสนามสำหรับการเชื่อมต่อโดรนที่มากขึ้นและมีความซับซ้อนดังตัวอย่างดังนี้
วันนี้จะนำเสนอการขับเคลื่อนหุ่นยนต์ แบบง่ายๆ ซึ่งสามารถทำได้เอง ทำให้หุ่นยนต์ขับเคลื่อนเอง โดยหลบกับสิ่งกีดขวางต่างๆ ในแผนที่ได้
อ้างอิงจาก เวบไซต์ของ ROS
https://www.theconstructsim.com/wp-content/uploads/2020/02/ros_developers_live_class_n80.pdf
เริ่มต้นด้วยสมัครสมาชิกROS https://rds.theconstructsim.com/ ใช้ google account หรือ facebook ขอแนะนำ ใช้ google chrome เพื่อความเสถียรของระบบ

หลังจากนั้นสร้าง New ROSject และเลือก parameter ดังนี้


เมื่อเลือก ROS configuration และ Robot ที่จะโปรแกรมได้แล้ว ให้กด Create จะขึ้นหน้าจอ ทำงานดังนี้

สร้าง Package และ config source สำหรับ environment
ในบางครั้งที่ระบบ ROS เราต้อง source environment ของระบบ ด้วย คำสั่งดังนี้ โดยคำสั่งจะ แสดงชุดคำสั่งใน .bashrc เพื่อเริ่มต้นระบบ สำหรับ environment ของ ROS
In [ ]: $ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
In [ ]: $ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
In [ ]: $ catkin_create_pkg rosbot_patrol roscpp
สำหรับการสร้างระบบ simulation ของ robot_patrol_simulation ซึ่งเราสร้างใน simulation_ws/src ด้วยคำสั่งจากเชลล์ดังนี้
In [ ]: $ catkin_create_pkg rosbot_patrol_simulation roscpp
ณ. ตอนนี้เราได้สร้าง package ของระบบเรียบร้อย ให้เรา catkin_make ใน folder ทั้งสองเพื่อตรวจสอบการทำงานของระบบ
In [ ]: user:~/catkin_ws$ catkin_make
In [ ]: user:~/simulation_ws$ catkin_makeเมื่อเรียบร้อยระบบจะขึ้นข้อความสำเร็จดังรูป
 |
| Catkin_ws |
 |
| Simulation_ws |
ขั้นตอนส่วนของ Simulation
เข้าไปยัง Package และ เรียกใช้ command ดังนี้
In [ ]: $ cd simulation_ws/src/rosbot_patrol_simulation
หลังจากนั้นสร้าง folder ใหม่ชื่อ worlds ด้วยชุดคำสั่งดังนี้
In [ ]: $ mkdir worlds
เข้าไปใน โฟลเดอร์ และสร้างไฟล์ ชื่อ model.world จะสร้างใน IDE เพื่อง่ายในการใช้งาน



และ copy code ข้างล่างใส่เข้าไป
In [ ]:
ขั้นตอนนี้เป็นการสร้า rosbot_description package ในส่วนของ rosbot เพื่อเชื่อมการทำงานในส่วนของ base_link และ ส่วนต่างๆของ rosbot
เริ่มต้นทดลอง Simulation กัน ไปที่ Simulations เมนู และเลือก Choose launch file..


หลังจากนั้น คุณจะเห็น simulation ดังรูป

Mapping code
Gmapping
หลังจาก simulation เรียบร้อยแล้ว ให้เข้าไปในส่วนของ catkin_ws/src/rosbot_patrol/src และสร้าง โฟลเดอร์ เรียกว่า launch และสร้างไฟล์ชื่อว่า gmapping_only.launch และ copy code เข้าไปIn [ ]:
และในส่วนของค่าต่างๆที่เราสามารถสร้างวัตถุลงในโลกเสมือนได้โดยมีตัวอย่างของ Husarion ให้ศึกษาดังนี้
(https://husarion.com/tutorials/ros-projects/security-guard-robot/)
โดยสามารถกำหนดค่าต่างๆใน directory ในส่วนของ Scan , base_link , map และ odom
Move_base
หลังจากนั้น สร้างไฟล์อีกอันใน folder launch ชื่อ move_base_only.launch และ copy code ดังนี้In [ ]:
สังเกตุว่าให้สร้างไฟล์ทั้งหมดไว้ใน rosbot_patrol_simulation pkg เพราะค่า params ต่างๆ จะเรียกใช้จาก folder นี้
หลังจากนั้นสร้างโฟลเดอร์ catkin_ws/src/rosbot_patrol/src ชื่อว่า config และ สร้างไฟล์ในโฟลเดอร์ ชื่อว่า global_costmap_params.yaml และ copy code ดังนี้
In [ ]:
ใน global cost map นี้จะมีส่วนสำคัญในการค้นหา และ สร้างแผนที่ การกำหนด parameter บางตัวเพื่อให้ ระบบ คนหาเส้นทางได้ง่ายขึ้น
Creating the launch file and save the map
คราวนี้เข้าไปใน launch folder อีกครั้ง สร้างไฟล์ชื่อ running_gmapping.launch และ copy code ดังนี้In [ ]:
ในการที่จะเริ่มต้นใช้งานชุดคำสั่งนี้ ให้เปิด Shell ใหม่ และ พิมพ์ command ดังนี้ซึ่งคุณจะเห็นภาพของ robot ใน graphical tools ใน Tools menu
In [ ]: $ roslaunch rosbot_patrol running_gmapping.launchสร้าง rviz สำหรับ visualization ด้วยการเปิด shell ใหม่ และ พิมพ์คำสั่งดังนี้
In [ ]: $ rvizเมื่อ Rviz เปิดขึ้นมาจะแสดงรายละเอียดเกี่ยวกับ โมเดลของ robot และ แผนที่ และ ให้เราทำการ สำรวจแผนที่ แก้ไขเฟรม และ เพิ่ม map, laser scan topic และ Robot model ต่างๆดังรูป

ทำโดยกดที่ปุ่ม Add และในส่วน Tab By display type เพิ่ม LaserScan , RobotModel และ Map
จากนี้เป็นการเรียก teleop_twist_keybord เพื่อให้ rosbot แสกนพื้นที่แบบ manual ให้ทั่ว ในแผนที่ โดยใช้คำสั่งดังนี้
In [ ]: $ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
ซึ่งสามารถควบคุม rosbot ใน simulation world ได้ด้วยตัวอักษรบน Keyboard ดังรูป


หลังจากที่สำรวจพื้นที่ทั้งหมดได้เรียบร้อยแล้ว ให้เข้าไปที่ directory ด้วยคำสั่งดังนี้
In [ ]: $ cd catkin_ws/src/rosbot_patrol/src
และสร้าง โฟลเดอร์ maps และ เรียกใช้คำสั่งนี้ใน โฟลเดอร์ดังกล่าว
In [ ]: $ rosrun map_server map_saver -f rosbot_map
จะได้ ไฟล์รูปภาพมาซึ่งสามารถ Download มาดูได้ นามสกุล pgm
Amcl to navigate
เมื่อสร้างแผนที่เรียบร้อยแล้วสร้าง launch ไฟล์อีกอันสำหรับ acml เพื่อให้ rosbot ค้นหาสถานที่ในแผนที่เอง โดยเข้าไปโฟลเดอร์ launch และ สร้างไฟล์ที่ชื่อว่า amcl_only.launch และ copy code ดังนี้In [ ]:
Final launch file
เพื่อทดสอบโครงงาน rosject เราสร้าง launch ไฟล์ ตัวใหม่ชื่อว่า nav_rosbot.launch
In [ ]:
และเรียกใช้งานคำสั่งนี้ใน Shell
In [ ]: $ roslaunch rosbot_patrol nav_rosbot.launchเมื่อเปิด Graphical Tools ขึ้นมาจะเห็นว่า Robot จะสำรวจพื้นที่ และ เราสามารถใช้ rosbot ไปยังตำแหน่งต่างๆได้ด้วยคำสั่ง 2D Nav Goal

Connect to the real robot
เมื่อ ติดตั้ง rosds_real_robot_connection ซึ่งสามารถอ่านเพิ่มเติมได้จากนี้
(https://www.theconstructsim.com/use-real-robot-connection-rosdevelopementstudio/)
Turn On the Real Robot Connection from the Robots side
คุณสามารถติดตั้งคำสั่งเหล่านี้เพื่อควบคุมติดตามการทำงานของ robot ได้เปิดเวบเบราเซอร์ (แนะนำใช้ google chrome) และ ใส่ IP ของ deviceตามด้วย port 3000
และ user_name_in_device=panandtilt

ซึ่งในอนาคตจะได้เห็น Mobile Robotic ฝีมือคนไทยเพื่อใช้ใน อุตสาหกรรมต่างๆ ในเร็วๆนี้
ในส่วนของ ROS ได้มีการพัฒนา ROS2 โดยเปลี่ยนโครงสร้างระบบทั้งหมด ซึ่งสามารถหาอ่านได้จาก
ที่มา และ ข้อมูลอ้างอิง :
อบรมสัมนา Course RAI กับทาง สจล. : https://www.facebook.com/KMITL.RoboticsAI
ROS กับการสร้างแขนกล : https://www.jesseweisberg.com/moveo-with-ros
หุ่นยนต์สุนัขสร้างด้วย ROS : http://zlethic.com/quadruped-tsuki/
แหล่งท่องเที่ยวเชิงวัฒนธรรมอีกแห่ง ใน Sun Moon Lake
เพลิดเพลินเดินทางสถานที่แปลกใหม่ Sun Moon Lake กับมุมมองในใจกลางเกาะไต้หวัน ด้วยวัฒนธรรมที่ไม่แตกต่างกัน
เริ่มเดินทางด้วยรถไฟ TRA หรือ THSR Station (High Speed Train) มุ่งหน้าไปสู่สถานี Taichung ซึ่งเป็นเมืองท่า เพื่อต่อรถบัสไปยัง Sun Moon Lake
Taipei Main Station (BL12/RL10) -> THSR Taipei Station -> THSR Taichung -> Nantou Bus -> Sun Moon Lake (Shuishe Pier)
 |
| รถไฟ THSR มุ่งหน้าไป Taichung |
 |
| ป้ายโฆษณาที่สถานี Taichung เน้น Social media |
 |
| ตั๋วรถไฟความเร็วสูง |
 |
| ราคาตั๋วแต่ละประเภท |
 |
| ทริปสำหรับเดินทางใน Sun Moon Lake |
 |
| ตั๋ว Sun Moon Lake |
 |
| HSR <-> Sun Moon Lake |
 |
| มีรถบางคันเดินทางไปเฉพาะ Puli ต้องสอบถาม |
 |
| ศูนย์นักท่องเที่ยว Sun Moon Lake |
 |
| ท่าเรือ Shuishe จุดเริ่มต้นเดินทาง Sun Moon Lake |
 |
| คับคั่งไปด้วยเรือเดินทางมีทั้งไกด์ภาษาจีน และ อังกฤษ |
 |
| มีเก็บอัฐืพระถังซัมจั๋ง ณ.วัดเซวียนจ้าง |
 |
| ภาพมุมสูงสมัยก่อนยุคเริ่มในปี 1955 |
 |
| นักร่อนเร่พเนจร ธุดงค์ สมัยก่อน |
 |
| แหล่งซื้อขายของพื้นเมือง |
 |
| ร้านชาดำขึ้นชื่อของท่าเรือ Ita Thao |
 |
| ร้านชานมไข่มุก TEA18 |
 |
| รีสอร์ทภายในบริเวณท่าเรือ Ita Thao |
 |
| กระเช้าลอยฟ้า |
 |
| กระเช้าลอยฟ้าแบบ Crystal เห็นได้รอบทิศทาง |
 |
| มุมมองจากด้านบนกระเช้าลงมา |
 |
| รายงานสภาพอากาศรอบๆ เพื่อตัดสินใจ พักหรือ เดินทางกลับ |




Taipei Main Station (BL12/R10) -> Ximen Station (BL11/G12) -> ร้านหม่าล่ายวนยาง (Yuanyang hotpot)



ท่องเมืองวัฒนธรรมกับ Jiufen ที่ Pinghsi/RuiFung
ปูมประวัติการเดินทางด้วยรถไฟ หลังจาก ถึงสถานที่หมายโดยเดินทางอย่างสะดวกสบายด้วยตั๋วโดยสารรถไฟ ซึ่งสามารถ ซื้อล่วงหน้า ผ่านเวบได้ http://twtraffic.tra.gov.tw/twrail/EN_QuickSearch.aspx
โดยเลือกเส้นทางต้นทาง จาก Taipei/Taipei Station ไปยังจุดหมายปลายทางภาคตะวันออก Pinghsi/Ruifang
ราคาปรับเปลี่ยนตามช่วงเวลาที่จอง และ ระยะเวลาจองล่วงหน้า
 |
| เข้าถึงเวบไซต์ ที่ twtraffic.tra.gov.tw |
 |
| สถานที่ท่องเที่ยวต่างๆ ด้วยรถไฟ TRA |
 |
| ครอบคลุมพื้นที่ภายในเกาะไต้หวัน |
 |
| สถานที่ต่างๆที่แวะระหว่างเดินทางไป Ruifang |

 |
| สภาพบรรยากาศภายนอกระหว่างเดินทาง |
 |
| มาเที่ยวครั้งนี้เหมือน ไอศครีม ไม่มาก็ละลาย |
 |
| ตึกอาคาร สมัยเก่าเพื่อต้อนรับนักท่องเที่ยว |
 |
| เมือง Ruifang เป็นเหมืองมาก่อน และเป็นแหล่งขุดแร่ธาตุ |
 |
| ซึ่งนักขุดสมัยก่อน จะช่วยกันแบบครอบครัว |
 |
| เทียบการขุดสมัยก่อนกับปัจจุบัน |
 |
| สภาพบรรยากาศภายนอก |
 |
| ทางเข้าไปในย่านตลาด Jeifhen |
 |
| ร้านน้ำชาในตำนาน A-Mei ซึ่งใช้เล่นละครเรื่อง Spirit Away |
 |
| ภาพบรรยากาศภายนอกเมื่อมองเข้ามาในร้าน A-Mei |
 |
| ชากุหลาบสำหรับ สุภาพสตรี |
 |
| ชาอูหลงเย็น |
 |
| เครื่องประดับต่างๆ |





ลัดเลาะสู่เมือง SynTrend แดนเทคโนโลยีย่าน ไทเป
 |
| ตึก SynTrend |
ภายด้านนอกมีรถมาโปรโมทหนัง X-Men พอดิบพอดี โดยใช้เทคโนโลยี ถ่ายรูป 360 เพื่อแสดงภาพเปล่งแสง ด้วยเนื่องจาก ตัวตึก ติดกับโรงหนังพอดี
 |
| ผู้คนหลังไหลเข้ามาเป็นระยะๆ เป็นที่ๆหนึ่งที่คนหนาแน่นค่อนข้างมาก |
 |
|
|


สำหรับผู้ชื่นชอบเสี่ยงโชคจากการเล่น slot machine และ ตู้คีบของ มีจุดบริการให้เล่นแบบ จอใหญ่ๆให้ ได้ ถ่ายรูป และ รับบัตรส่วนลด เพื่อใช้จับจ่ายภายในร้านอาหาร และ ภายในอาคาร
ตู้กดน้ำมากมาย มีทั้งแบบให้เลือกสินค้า และ บริการต่างๆ
 |
| ตู้น้ำกดใช้ QR Code และ Easy Card |
 |
| Snack ให้เลือกตามความชอบ |
 |
| เครื่องดื่มกระป๋องตามความชอบ |
 |
| เกมส์การ์ดสำหรับผู้ชื่นชอบ |
 |
| ตู้กดแบบเลือกสินค้าในท้องถิ่น |
 |
| ตู้กดน้ำดื่ม ร้อน อุ่น เย็น ตามความต้องการ |
 |
| ตู้สินค้า สารพัด เอนกประสงค์ |
 |
| ตู้กดน้ำดื่ม แบบมีแขน Robot |
 |
| ตู้กดแบบกล่องพิศวง ให้เลือกว่าอยากได้โชคแบบไหน |
 |
| สามารถเลือกสินค้า และ วิธีการรับผ่าน Line และ ช่องทางต่างๆ |
ของช็อปปิ้งทางด้าน IT ให้เลือกมากมาย
 |
| คีย์บอร์ดแบบเครื่องพิมพ์ดีด |
 |
| อุปกรณ์เครื่องออกกำลังกายเชื่อมต่อกับมือถือ |
 |
| เครื่องเล่นแบบ 360 โดยมี Action Virtual Reality |
 |
| สำหรับผู้ที่พัฒนา SynTrend มีชั้นสำรับผู้สร้าง & ต่อยอด |
 |
| เครื่องจ่ายเงิน ตาม บัตรต่างๆ |
 |
| แลกทอน ธนบัตรประเภทต่างๆ |
 |
| ภายนอกรอบๆ บริเวณ เต็มไปด้วยร้านค้าขายของอุปกรณ์ด้าน IT มีให้เลือกมากมาย ตามความชอบ |
ศึกษาหาข้อมูลเพิ่มเติมได้ที่ https://aiyprojects.withgoogle.com/voice/

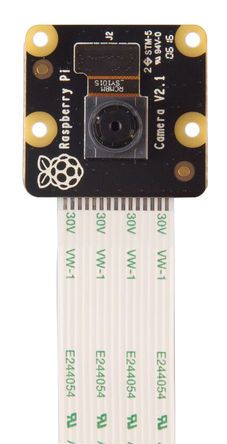



ขั้นที่ 2: ติดตั้งระบบกล้อง RPi(ทำไปแล้วในลำดับแรก
ขั้นที่ 4: อัพเดต และ อัพเกรด RPi ด้วยชุดคำสั่งดังนี้:
sudo apt-get update
sudo apt-get dist-upgrade
git clone https://github.com/silvanmelchior/RPi_Cam_Web_Interface.git
cd RPi_Cam_Web_Interface
./install.sh


ซึ่งเมื่อต่อชุดเข้ากับช่อง USB ของ RPi เราสามารถอ่านค่า ของ Port USB ด้วยคำสั่ง
lsusb
Bus 001 Device 004: ID 24f7:2204
pi@raspberrypi:~ $ udevadm info -a -p $(udevadm info -q path -n /dev/bus/usb/001/004)
Udevadm info starts with the device specified by the devpath and then
walks up the chain of parent devices. It prints for every device
found, all possible attributes in the udev rules key format.
A rule to match, can be composed by the attributes of the device
and the attributes from one single parent device.
looking at device '/devices/platform/soc/3f980000.usb/usb1/1-1/1-1.1/1-1.1.2':
KERNEL=="1-1.1.2"
SUBSYSTEM=="usb"
DRIVER=="usb"
ATTR{authorized}=="1"
ATTR{avoid_reset_quirk}=="0"
ATTR{bConfigurationValue}=="1"
ATTR{bDeviceClass}=="00"
ATTR{bDeviceProtocol}=="02"
ATTR{bDeviceSubClass}=="00"
ATTR{bMaxPacketSize0}=="64"
ATTR{bMaxPower}=="250mA"
ATTR{bNumConfigurations}=="1"
ATTR{bNumInterfaces}==" 1"
ATTR{bcdDevice}=="0125"
ATTR{bmAttributes}=="80"
ATTR{busnum}=="1"
ATTR{configuration}==""
ATTR{devnum}=="4"
ATTR{devpath}=="1.1.2"
ATTR{devspec}==" (null)"
ATTR{idProduct}=="2204"
ATTR{idVendor}=="24f7"
ATTR{ltm_capable}=="no"
ATTR{manufacturer}=="Seneye ltd"
ATTR{maxchild}=="0"
ATTR{product}=="Seneye SUD v 2.0.16"
ATTR{quirks}=="0x0"
ATTR{removable}=="removable"
ATTR{serial}=="XXXXXXXXXXXXXXXXXX"
ATTR{speed}=="12"
ATTR{urbnum}=="17"
ATTR{version}==" 2.00"
Device: XXXXXXXXXXXXXXXXX v.2.0.16 Type: HomeTemperature (C) │ 20.375 Is Kelvin │pH │ 7.94 Kelvin │NH3 (ppm) │ 0.02 PAR │In Water │ True LUX │ Slide NOT fitted │ False PUR │ Slide Expired │ False │Press R for reading, 1-5 to change LED, Q to quit


ซึ่งนักพัฒนาเวบ และ ผู้เชี่ยวชาญด้าน IT ต่างเห็นพ้องกันว่าเรื่องความปลอดภัยของข้อมูลส่วนบุคคลเป็นเรื่องสำคัญ
อย่างไรก็ตามด้วยเทคโนโลยีที่เปลี่ยนและพัฒนาให้สะดวกแก่ผู้ใช้ และข้อมูลที่เกิดขึ้นจากการใช้เทคโนโลยีนั้นเป็นจุดอ่อนที่ยากที่จะสังเกตุจนกว่าองค์กรจะทราบถึงสิ่งที่เกิดขึ้น ซึ่งผู้ไม่หวังดีใช้เทคนิคที่เปลี่ยนอุปกรณ์เล็กๆ เหล่านี้กลายเป็นอาวุธที่สามารถลามและเจาะเข้าไปถึงข้อมูลต่างๆของบริษัท และนั้นคือการทำลายของ infrastructure และต่อยอดไป
หนึ่งในการขู่กรรโชกความปลอดภัยข้อมูลที่พบมากคือ อุปกรณ์ IoT และการเติบโตของเทคโนโลยีอุปกรณ์สวมใส่ อย่างเช่น FitBit , Google developingglass , fitness trackers และ นาฬิกาที่ทำให้ใช้ชีวิตได้ง่ายขึ้น ซึ่งไม่ได้เกินไปกว่าความสนุก และการใช้เทคโนโลยีกับไลฟ์สไตล์ของแต่ละบุคคล
จากการประมาณคาดการเบื้องต้นของข้อมูล PWC (Pricewaterhouse Cooper’s Report) ภายในปี 2020 จะมีอุปกรณ์สวมใส่ที่เข้ามาสู่โลก IoT ถึง 50 ล้านชิ้นที่เข้ามาเชื่อมต่อโลกอินเตอร์เน็ต และนอกจากนั้น ในปี 2016, มูลค่าการตลาด embeded technology market สูงถึง 9 พันล้านดอลล่าร์ และมีคาดการ์ณว่า จะสูงถึง 9หมื่นล้านในปี 2021 ข้อมูลสนับสนุนจาก ReportLinker ด้วยจำนวนตัวเลขของอุปกรณ์สวมใส่หลักล้าน ซึ่งส่งผลให้ต้องเพิ่มเรื่องความปลอดภัยด้วยเช่นกัน
ในปี 2015 สิ่งที่กังวลเกี่ยวกับการท่องเที่ยวคือเรื่องความปลอดภัยในโลกอินเตอร์เน็ต และ ในความเป็นจริงไวรัส mirai malware เจาะเข้าไปยัง kreb on security และ DNS service provide Dyn นั้นคือทุกๆอุปกรณ์สวมใส่ที่เชื่อมต่อ หรือ IoT ผ่านระบบ Cloud เปิดโอกาสให้ หนอนเจาะระบบเข้าถึงง่ายเช่นกัน
ถึงเวลาแล้วที่เราควรจะพูดถึงเรื่องความปลอดภัย ของข้อมูล
ในขณะเดียวกันที่เราใช้ OpenShift in google cloud, ข้อมูลใน SSD ของคุณ จะถูกเชื่อมต่อไปยัง Cloud ถ้าไม่จัดการอย่างถูกต้อง และ ถ้าไม่ได้ใช้ควบคู่กับ LUKS by Red Hat Enterprise Linux หรือ FDE (Full Disk Encryption) และ การเชื่อมต่อระหว่าง มือถือ กับ คลาวด์ และ bluetooth ที่เชื่อมต่ออุปกรณ์สวมใส่กับมือถือ ซึ่งเป็นการสร้างการเชื่อมต่อระหว่างอุปกรณ์ และ เปิดโอกาสให้ Hacker เข้ามาเจาะข้อมูลได้
แล้วนักพัฒนาจะสามารถป้องกันข้อมูลรั่วไหลจากอุปกรณ์สวมใส่ได้อย่างไร
ซึ่งสามารถทำได้หลายวิธีเช่น การควบคุมUsernameผู้ใช้ , สร้างคลาวด์ที่ปลอดภัย , เข้าระหัสข้อมูลBluetooth , สร้างระบบตรวจสอบ Biometric , สร้างระบบ สถานที่ และควบคุม ล็อคทางไกลได้ , การเข้าระหัสข้อมูลไฟล์ และ การใช้ FDE
สรุปรวมแล้วเทคโนโลยีอุปกรณ์สวมใส่ยังคงเติบโตเพิ่มขึ้น 2 หลักในอุตสาหกรรมไอที ซึ่งก็อาจไม่เป็นเช่นนั้น ในความเป็นจริง การพิจารณาเรื่อง การเข้าระหัสข้อมูล และ การรักษาความปลอดภัยของข้อมูล และสร้างความสามารถของอุปกรณ์สวมใส่ และ เชื่อมต่อสัมพันธ์ระหว่าง นักพัฒนา และ เทคโนโลยีในโลกธุรกิจ ให้ยาวนานเท่าที่เป็นไปได้
